Bipedalism is a form of terrestrial locomotion where a tetrapod moves by means of its two rear limbs or legs. An animal or machine that usually moves in a bipedal manner is known as a biped, meaning 'two feet'. Types of bipedal movement include walking or running and hopping.
Walking is one of the main gaits of terrestrial locomotion among legged animals. Walking is typically slower than running and other gaits. Walking is defined by an 'inverted pendulum' gait in which the body vaults over the stiff limb or limbs with each step. This applies regardless of the usable number of limbs—even arthropods, with six, eight, or more limbs, walk. In humans, walking has health benefits including improved mental health and reduced risk of cardiovascular disease and death.
Gait is the pattern of movement of the limbs of animals, including humans, during locomotion over a solid substrate. Most animals use a variety of gaits, selecting gait based on speed, terrain, the need to maneuver, and energetic efficiency. Different animal species may use different gaits due to differences in anatomy that prevent use of certain gaits, or simply due to evolved innate preferences as a result of habitat differences. While various gaits are given specific names, the complexity of biological systems and interacting with the environment make these distinctions "fuzzy" at best. Gaits are typically classified according to footfall patterns, but recent studies often prefer definitions based on mechanics. The term typically does not refer to limb-based propulsion through fluid mediums such as water or air, but rather to propulsion across a solid substrate by generating reactive forces against it.

Gait analysis is the systematic study of animal locomotion, more specifically the study of human motion, using the eye and the brain of observers, augmented by instrumentation for measuring body movements, body mechanics, and the activity of the muscles. Gait analysis is used to assess and treat individuals with conditions affecting their ability to walk. It is also commonly used in sports biomechanics to help athletes run more efficiently and to identify posture-related or movement-related problems in people with injuries.

Brachiation, or arm swinging, is a form of arboreal locomotion in which primates swing from tree limb to tree limb using only their arms. During brachiation, the body is alternately supported under each forelimb. This form of locomotion is the primary means of locomotion for the small gibbons and siamangs of southeast Asia. Gibbons in particular use brachiation for as much as 80% of their locomotor activities. Some New World monkeys, such as spider monkeys and muriquis, were initially classified as semibrachiators and move through the trees with a combination of leaping and brachiation. Some New World species also practice suspensory behaviors by using their prehensile tail, which acts as a fifth grasping hand. Evidence has shown that the extinct ape Proconsul from the Miocene of East Africa developed an early form of suspensory behaviour, and was therefore referred to as a probrachiator.

A gait is a manner of limb movements made during locomotion. Human gaits are the various ways in which humans can move, either naturally or as a result of specialized training. Human gait is defined as bipedal forward propulsion of the center of gravity of the human body, in which there are sinuous movements of different segments of the body with little energy spent. Varied gaits are characterized by differences such as limb movement patterns, overall velocity, forces, kinetic and potential energy cycles, and changes in contact with the ground.
Robot locomotion is the collective name for the various methods that robots use to transport themselves from place to place.
Inverse dynamics is an inverse problem. It commonly refers to either inverse rigid body dynamics or inverse structural dynamics. Inverse rigid-body dynamics is a method for computing forces and/or moments of force (torques) based on the kinematics (motion) of a body and the body's inertial properties. Typically it uses link-segment models to represent the mechanical behaviour of interconnected segments, such as the limbs of humans or animals or the joint extensions of robots, where given the kinematics of the various parts, inverse dynamics derives the minimum forces and moments responsible for the individual movements. In practice, inverse dynamics computes these internal moments and forces from measurements of the motion of limbs and external forces such as ground reaction forces, under a special set of assumptions.
Passive dynamics refers to the dynamical behavior of actuators, robots, or organisms when not drawing energy from a supply. Depending on the application, considering or altering the passive dynamics of a powered system can have drastic effects on performance, particularly energy economy, stability, and task bandwidth. Devices using no power source are considered "passive", and their behavior is fully described by their passive dynamics.

Terrestrial locomotion has evolved as animals adapted from aquatic to terrestrial environments. Locomotion on land raises different problems than that in water, with reduced friction being replaced by the increased effects of gravity.
A facultative biped is an animal that is capable of walking or running on two legs (bipedal), as a response to exceptional circumstances (facultative), while normally walking or running on four limbs or more. In contrast, obligate bipedalism is where walking or running on two legs is the primary method of locomotion. Facultative bipedalism has been observed in several families of lizards and multiple species of primates, including sifakas, capuchin monkeys, baboons, gibbons, gorillas, bonobos and chimpanzees. Different facultatively bipedal species employ different types of bipedalism corresponding to the varying reasons they have for engaging in facultative bipedalism. In primates, bipedalism is often associated with food gathering and transport. In lizards, it has been debated whether bipedal locomotion is an advantage for speed and energy conservation or whether it is governed solely by the mechanics of the acceleration and lizard's center of mass. Facultative bipedalism is often divided into high-speed (lizards) and low-speed (gibbons), but some species cannot be easily categorized into one of these two. Facultative bipedalism has also been observed in cockroaches and some desert rodents.

Legged robots are a type of mobile robot which use articulated limbs, such as leg mechanisms, to provide locomotion. They are more versatile than wheeled robots and can traverse many different terrains, though these advantages require increased complexity and power consumption. Legged robots often imitate legged animals, such as humans or insects, in an example of biomimicry.

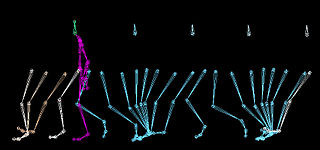
The evolution of human bipedalism, which began in primates approximately four million years ago, or as early as seven million years ago with Sahelanthropus, or approximately twelve million years ago with Danuvius guggenmosi, has led to morphological alterations to the human skeleton including changes to the arrangement, shape, and size of the bones of the foot, hip, knee, leg, and the vertebral column. These changes allowed for the upright gait to be overall more energy efficient in comparison to quadrupeds. The evolutionary factors that produced these changes have been the subject of several theories that correspond with environmental changes on a global scale.

Sprinting involves a quick acceleration phase followed by a velocity maintenance phase. During the initial stage of sprinting, the runners have their upper body tilted forward in order to direct ground reaction forces more horizontally. As they reach their maximum velocity, the torso straightens out into an upright position. The goal of sprinting is to reach and maintain high top speeds to cover a set distance in the shortest possible time. A lot of research has been invested in quantifying the biological factors and mathematics that govern sprinting. In order to achieve these high velocities, it has been found that sprinters have to apply a large amount of force onto the ground to achieve the desired acceleration, rather than taking more rapid steps.

The effect of gait parameters on energetic cost is a relationship that describes how changes in step length, cadence, step width, and step variability influence the mechanical work and metabolic cost involved in gait. The source of this relationship stems from the deviation of these gait parameters from metabolically optimal values, with the deviations due to environmental, pathological, and other factors.

Cutaneous, superficial, or skin reflexes, are activated by skin receptors and play a valuable role in locomotion, providing quick responses to unexpected environmental challenges. They have been shown to be important in responses to obstacles or stumbling, in preparing for visually challenging terrain, and for assistance in making adjustments when instability is introduced. In addition to the role in normal locomotion, cutaneous reflexes are being studied for their potential in enhancing rehabilitation therapy (physiotherapy) for people with gait abnormalities.
A (bipedal) gait cycle is the time period or sequence of events or movements during locomotion in which one foot contacts the ground to when that same foot again contacts the ground, and involves propulsion of the centre of gravity in the direction of motion. A gait cycle usually involves co-operative movements of both the left and right legs and feet. A single gait cycle is also known as a stride.

Gait deviations are nominally referred to as any variation of standard human gait, typically manifesting as a coping mechanism in response to an anatomical impairment. Lower-limb amputees are unable to maintain the characteristic walking patterns of an able-bodied individual due to the removal of some portion of the impaired leg. Without the anatomical structure and neuromechanical control of the removed leg segment, amputees must use alternative compensatory strategies to walk efficiently. Prosthetic limbs provide support to the user and more advanced models attempt to mimic the function of the missing anatomy, including biomechanically controlled ankle and knee joints. However, amputees still display quantifiable differences in many measures of ambulation when compared to able-bodied individuals. Several common observations are whole-body movements, slower and wider steps, shorter strides, and increased sway.
The study of animal locomotion is a branch of biology that investigates and quantifies how animals move.
Interlimb coordination is the coordination of the left and right limbs. It could be classified into two types of action: bimanual coordination and hands or feet coordination. Such coordination involves various parts of the nervous system and requires a sensory feedback mechanism for the neural control of the limbs. A model can be used to visualize the basic features, the control centre of locomotor movements, and the neural control of interlimb coordination. This coordination mechanism can be altered and adapted for better performance during locomotion in adults and for the development of motor skills in infants. The adaptive feature of interlimb coordination can also be applied to the treatment for CNS damage from stroke and the Parkinson's disease in the future.