A tire or tyre is a ring-shaped component that surrounds a wheel's rim to transfer a vehicle's load from the axle through the wheel to the ground and to provide traction on the surface over which the wheel travels. Most tires, such as those for automobiles and bicycles, are pneumatically inflated structures, providing a flexible cushion that absorbs shock as the tire rolls over rough features on the surface. Tires provide a footprint, called a contact patch, designed to match the vehicle's weight and the bearing on the surface that it rolls over by exerting a pressure that will avoid deforming the surface.
Vehicle dynamics is the study of vehicle motion, e.g., how a vehicle's forward movement changes in response to driver inputs, propulsion system outputs, ambient conditions, air/surface/water conditions, etc. Vehicle dynamics is a part of engineering primarily based on classical mechanics. It may be applied for motorized vehicles, bicycles and motorcycles, aircraft, and watercraft.

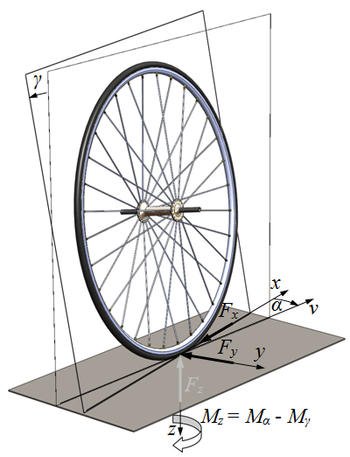
The circle of forces, traction circle, friction circle, or friction ellipse is a useful way to think about the dynamic interaction between a vehicle's tire and the road surface. The diagram below shows the tire from above, so that the road surface lies in the xy-plane. The vehicle to which the tire is attached is moving in the positive y direction.

In vehicle dynamics, slip angle or sideslip angle is the angle between the direction in which a wheel is pointing and the direction in which it is actually traveling. This slip angle results in a force, the cornering force, which is in the plane of the contact patch and perpendicular to the intersection of the contact patch and the midplane of the wheel. This cornering force increases approximately linearly for the first few degrees of slip angle, then increases non-linearly to a maximum before beginning to decrease.

The caster angle or castor angle is the angular displacement of the steering axis from the vertical axis of a steered wheel in a car, motorcycle, bicycle, other vehicle or a vessel, as seen from the side of the vehicle. The steering axis in a car with dual ball joint suspension is an imaginary line that runs through the center of the upper ball joint to the center of the lower ball joint, or through the center of the kingpin for vehicles having a kingpin.
Cornering force or side force is the lateral force produced by a vehicle tire during cornering.
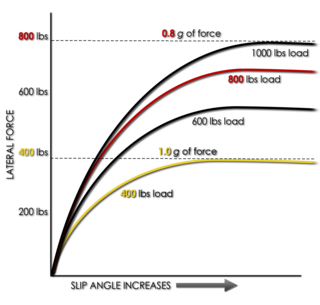
Tire load sensitivity describes the behaviour of tires under load. Conventional pneumatic tires do not behave as classical friction theory would suggest. The load sensitivity of most real tires in their typical operating range is such that the coefficient of friction decreases as the vertical load, Fz, increases. The maximum lateral force that can be developed does increase as the vertical load increases, but at a diminishing rate.

Bicycle and motorcycle dynamics is the science of the motion of bicycles and motorcycles and their components, due to the forces acting on them. Dynamics falls under a branch of physics known as classical mechanics. Bike motions of interest include balancing, steering, braking, accelerating, suspension activation, and vibration. The study of these motions began in the late 19th century and continues today.
Directional stability is stability of a moving body or vehicle about an axis which is perpendicular to its direction of motion. Stability of a vehicle concerns itself with the tendency of a vehicle to return to its original direction in relation to the oncoming medium when disturbed (rotated) away from that original direction. If a vehicle is directionally stable, a restoring moment is produced which is in a direction opposite to the rotational disturbance. This "pushes" the vehicle so as to return it to the original orientation, thus tending to keep the vehicle oriented in the original direction.
A Bundorf analysis is a measure of the characteristics of a vehicle that govern its understeer balance. The understeer is measured in units of degrees of additional yaw per g of lateral acceleration.

Bicycle and motorcycle geometry is the collection of key measurements that define a particular bike configuration. Primary among these are wheelbase, steering axis angle, fork offset, and trail. These parameters have a major influence on how a bike handles.
Tire uniformity refers to the dynamic mechanical properties of pneumatic tires as strictly defined by a set of measurement standards and test conditions accepted by global tire and car makers.

Tire balance, also called tire unbalance or tire imbalance, describes the distribution of mass within an automobile tire or the entire wheel on which it is mounted.
Hans Bastiaan Pacejka was an expert in vehicle system dynamics and particularly in tire dynamics, fields in which his works are now standard references. He was Professor emeritus at Delft University of Technology in Delft, Netherlands.

Pneumatic trail or trail of the tire is a trail-like effect generated by compliant tires rolling on a hard surface and subject to side loads, as in a turn. More technically, it is the distance that the resultant force of side-slip occurs behind the geometric center of the contact patch.

Camber thrust and camber force are terms used to describe the force generated perpendicular to the direction of travel of a rolling tire due to its camber angle and finite contact patch. Camber thrust is generated when a point on the outer surface of a leaned and rotating tire, that would normally follow a path that is elliptical when projected onto the ground, is forced to follow a straight path while coming in contact with the ground, due to friction. This deviation towards the direction of the lean causes a deformation in the tire tread and carcass that is transmitted to the vehicle as a force in the direction of the lean.

Relaxation length is a property of pneumatic tires that describes the delay between when a slip angle is introduced and when the cornering force reaches its steady-state value. It is also described as the distance that a tire rolls before the lateral force builds up to 63% of its steady-state value. It can be calculated as the ratio of cornering stiffness over the lateral stiffness, where cornering stiffness is the ratio of cornering force over slip angle, and lateral stiffness is the ratio of lateral force over lateral displacement.

The following outline is provided as an overview of and topical guide to tires: