Vector quantization (VQ) is a classical quantization technique from signal processing that allows the modeling of probability density functions by the distribution of prototype vectors. Developed in the early 1980s by Robert M. Gray, it was originally used for data compression. It works by dividing a large set of points (vectors) into groups having approximately the same number of points closest to them. Each group is represented by its centroid point, as in k-means and some other clustering algorithms. In simpler terms, vector quantization chooses a set of points to represent a larger set of points.

In digital image processing and computer vision, image segmentation is the process of partitioning a digital image into multiple image segments, also known as image regions or image objects. The goal of segmentation is to simplify and/or change the representation of an image into something that is more meaningful and easier to analyze. Image segmentation is typically used to locate objects and boundaries in images. More precisely, image segmentation is the process of assigning a label to every pixel in an image such that pixels with the same label share certain characteristics.
The scale-invariant feature transform (SIFT) is a computer vision algorithm to detect, describe, and match local features in images, invented by David Lowe in 1999. Applications include object recognition, robotic mapping and navigation, image stitching, 3D modeling, gesture recognition, video tracking, individual identification of wildlife and match moving.
Scale-space theory is a framework for multi-scale signal representation developed by the computer vision, image processing and signal processing communities with complementary motivations from physics and biological vision. It is a formal theory for handling image structures at different scales, by representing an image as a one-parameter family of smoothed images, the scale-space representation, parametrized by the size of the smoothing kernel used for suppressing fine-scale structures. The parameter in this family is referred to as the scale parameter, with the interpretation that image structures of spatial size smaller than about have largely been smoothed away in the scale-space level at scale .
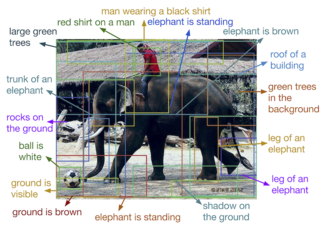
Automatic image annotation is the process by which a computer system automatically assigns metadata in the form of captioning or keywords to a digital image. This application of computer vision techniques is used in image retrieval systems to organize and locate images of interest from a database.
Structure from motion (SfM) is a photogrammetric range imaging technique for estimating three-dimensional structures from two-dimensional image sequences that may be coupled with local motion signals. It is studied in the fields of computer vision and visual perception.
In statistical classification, the Fisher kernel, named after Ronald Fisher, is a function that measures the similarity of two objects on the basis of sets of measurements for each object and a statistical model. In a classification procedure, the class for a new object can be estimated by minimising, across classes, an average of the Fisher kernel distance from the new object to each known member of the given class.
Mean shift is a non-parametric feature-space mathematical analysis technique for locating the maxima of a density function, a so-called mode-seeking algorithm. Application domains include cluster analysis in computer vision and image processing.
Articulated body pose estimation in computer vision is the study of algorithms and systems that recover the pose of an articulated body, which consists of joints and rigid parts using image-based observations. It is one of the longest-lasting problems in computer vision because of the complexity of the models that relate observation with pose, and because of the variety of situations in which it would be useful.
Part-based models refers to a broad class of detection algorithms used on images, in which various parts of the image are used separately in order to determine if and where an object of interest exists. Amongst these methods a very popular one is the constellation model which refers to those schemes which seek to detect a small number of features and their relative positions to then determine whether or not the object of interest is present.
Caltech 101 is a data set of digital images created in September 2003 and compiled by Fei-Fei Li, Marco Andreetto, Marc 'Aurelio Ranzato and Pietro Perona at the California Institute of Technology. It is intended to facilitate computer vision research and techniques and is most applicable to techniques involving image recognition classification and categorization. Caltech 101 contains a total of 9,146 images, split between 101 distinct object categories and a background category. Provided with the images are a set of annotations describing the outlines of each image, along with a Matlab script for viewing.
In computer vision, the problem of object categorization from image search is the problem of training a classifier to recognize categories of objects, using only the images retrieved automatically with an Internet search engine. Ideally, automatic image collection would allow classifiers to be trained with nothing but the category names as input. This problem is closely related to that of content-based image retrieval (CBIR), where the goal is to return better image search results rather than training a classifier for image recognition.

Pedestrian detection is an essential and significant task in any intelligent video surveillance system, as it provides the fundamental information for semantic understanding of the video footages. It has an obvious extension to automotive applications due to the potential for improving safety systems. Many car manufacturers offer this as an ADAS option in 2017.
Convolutional neural network (CNN) is a regularized type of feed-forward neural network that learns feature engineering by itself via filters optimization. Vanishing gradients and exploding gradients, seen during backpropagation in earlier neural networks, are prevented by using regularized weights over fewer connections. For example, for each neuron in the fully-connected layer, 10,000 weights would be required for processing an image sized 100 × 100 pixels. However, applying cascaded convolution kernels, only 25 neurons are required to process 5x5-sized tiles. Higher-layer features are extracted from wider context windows, compared to lower-layer features.
In computer vision, rigid motion segmentation is the process of separating regions, features, or trajectories from a video sequence into coherent subsets of space and time. These subsets correspond to independent rigidly moving objects in the scene. The goal of this segmentation is to differentiate and extract the meaningful rigid motion from the background and analyze it. Image segmentation techniques labels the pixels to be a part of pixels with certain characteristics at a particular time. Here, the pixels are segmented depending on its relative movement over a period of time i.e. the time of the video sequence.
In the domain of physics and probability, the filters, random fields, and maximum entropy (FRAME) model is a Markov random field model of stationary spatial processes, in which the energy function is the sum of translation-invariant potential functions that are one-dimensional non-linear transformations of linear filter responses. The FRAME model was originally developed by Song-Chun Zhu, Ying Nian Wu, and David Mumford for modeling stochastic texture patterns, such as grasses, tree leaves, brick walls, water waves, etc. This model is the maximum entropy distribution that reproduces the observed marginal histograms of responses from a bank of filters, where for each filter tuned to a specific scale and orientation, the marginal histogram is pooled over all the pixels in the image domain. The FRAME model is also proved to be equivalent to the micro-canonical ensemble, which was named the Julesz ensemble. Gibbs sampler is adopted to synthesize texture images by drawing samples from the FRAME model.

Video super-resolution (VSR) is the process of generating high-resolution video frames from the given low-resolution video frames. Unlike single-image super-resolution (SISR), the main goal is not only to restore more fine details while saving coarse ones, but also to preserve motion consistency.
Self-supervised learning (SSL) is a paradigm in machine learning where a model is trained on a task using the data itself to generate supervisory signals, rather than relying on external labels provided by humans. In the context of neural networks, self-supervised learning aims to leverage inherent structures or relationships within the input data to create meaningful training signals. SSL tasks are designed so that solving it requires capturing essential features or relationships in the data. The input data is typically augmented or transformed in a way that creates pairs of related samples. One sample serves as the input, and the other is used to formulate the supervisory signal. This augmentation can involve introducing noise, cropping, rotation, or other transformations. Self-supervised learning more closely imitates the way humans learn to classify objects.
Tensor informally refers in machine learning to two different concepts that organize and represent data. Data may be organized in a multidimensional array (M-way array) that is informally referred to as a "data tensor"; however in the strict mathematical sense, a tensor is a multilinear mapping over a set of domain vector spaces to a range vector space. Observations, such as images, movies, volumes, sounds, and relationships among words and concepts, stored in an M-way array ("data tensor") may be analyzed either by artificial neural networks or tensor methods.














