Sonar is a technique that uses sound propagation to navigate, measure distances (ranging), communicate with or detect objects on or under the surface of the water, such as other vessels.

In antenna theory, a phased array usually means an electronically scanned array, a computer-controlled array of antennas which creates a beam of radio waves that can be electronically steered to point in different directions without moving the antennas. The general theory of an electromagnetic phased array also finds applications in ultrasonic and medical imaging application and in optics optical phased array.
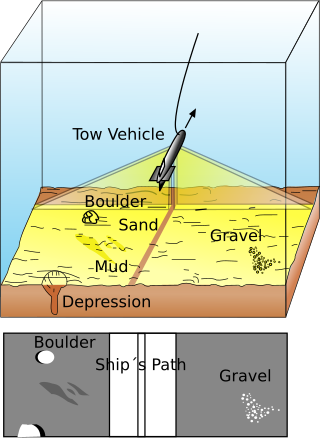
Side-scan sonar is a category of sonar system that is used to efficiently create an image of large areas of the sea floor.

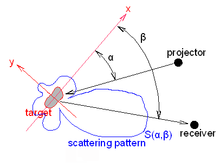
A multistatic radar system contains multiple spatially diverse monostatic radar or bistatic radar components with a shared area of coverage. An important distinction of systems based on these individual radar geometries is the added requirement for some level of data fusion to take place between component parts. The spatial diversity afforded by multistatic systems allows different aspects of a target to be viewed simultaneously. The potential for information gain can give rise to a number of advantages over conventional systems.

Echo sounding or depth sounding is the use of sonar for ranging, normally to determine the depth of water (bathymetry). It involves transmitting acoustic waves into water and recording the time interval between emission and return of a pulse; the resulting time of flight, along with knowledge of the speed of sound in water, allows determining the distance between sonar and target. This information is then typically used for navigation purposes or in order to obtain depths for charting purposes.

Hydrographic survey is the science of measurement and description of features which affect maritime navigation, marine construction, dredging, offshore oil exploration and drilling and related activities. Strong emphasis is placed on soundings, shorelines, tides, currents, seabed and submerged obstructions that relate to the previously mentioned activities. The term hydrography is used synonymously to describe maritime cartography, which in the final stages of the hydrographic process uses the raw data collected through hydrographic survey into information usable by the end user.

A directional antenna or beam antenna is an antenna which radiates or receives greater radio wave power in specific directions. Directional antennas can radiate radio waves in beams, when greater concentration of radiation in a certain direction is desired, or in receiving antennas receive radio waves from one specific direction only. This can increase the power transmitted to receivers in that direction, or reduce interference from unwanted sources. This contrasts with omnidirectional antennas such as dipole antennas which radiate radio waves over a wide angle, or receive from a wide angle.
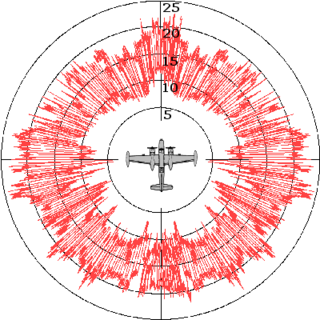
Radar cross-section (RCS), denoted σ, also called radar signature, is a measure of how detectable an object is by radar. A larger RCS indicates that an object is more easily detected.
In pulsed radar and sonar signal processing, an ambiguity function is a two-dimensional function of propagation delay and Doppler frequency , . It represents the distortion of a returned pulse due to the receiver matched filter of the return from a moving target. The ambiguity function is defined by the properties of the pulse and of the filter, and not any particular target scenario.
Beamforming or spatial filtering is a signal processing technique used in sensor arrays for directional signal transmission or reception. This is achieved by combining elements in an antenna array in such a way that signals at particular angles experience constructive interference while others experience destructive interference. Beamforming can be used at both the transmitting and receiving ends in order to achieve spatial selectivity. The improvement compared with omnidirectional reception/transmission is known as the directivity of the array.
Passive radar is a class of radar systems that detect and track objects by processing reflections from non-cooperative sources of illumination in the environment, such as commercial broadcast and communications signals. It is a specific case of bistatic radar – passive bistatic radar (PBR) – which is a broad type also including the exploitation of cooperative and non-cooperative radar transmitters.

The Medicina Radio Observatory is an astronomical observatory located 30 km from Bologna, Italy. It is operated by the Institute for Radio Astronomy of the National Institute for Astrophysics (INAF) of the government of Italy.

A multibeam echosounder (MBES) is a type of sonar that is used to map the seabed. It emits acoustic waves in a fan shape beneath its transceiver. The time it takes for the sound waves to reflect off the seabed and return to the receiver is used to calculate the water depth. Unlike other sonars and echo sounders, MBES uses beamforming to extract directional information from the returning soundwaves, producing a swathe of depth soundings from a single ping.
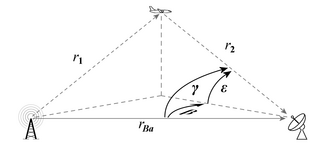
Bistatic radar is a radar system comprising a transmitter and receiver that are separated by a distance comparable to the expected target distance. Conversely, a conventional radar in which the transmitter and receiver are co-located is called a monostatic radar. A system containing multiple spatially diverse monostatic or bistatic radar components with a shared area of coverage is called multistatic radar. Many long-range air-to-air and surface-to-air missile systems use semi-active radar homing, which is a form of bistatic radar.

The AN/UQQ-2 Surveillance Towed Array Sensor System (SURTASS), colloquially referred to as the ship's "Tail", is a towed array sonar system of the United States Navy.

Underwater acoustics is the study of the propagation of sound in water and the interaction of the mechanical waves that constitute sound with the water, its contents and its boundaries. The water may be in the ocean, a lake, a river or a tank. Typical frequencies associated with underwater acoustics are between 10 Hz and 1 MHz. The propagation of sound in the ocean at frequencies lower than 10 Hz is usually not possible without penetrating deep into the seabed, whereas frequencies above 1 MHz are rarely used because they are absorbed very quickly.
Radar engineering details are technical details pertaining to the components of a radar and their ability to detect the return energy from moving scatterers — determining an object's position or obstruction in the environment. This includes field of view in terms of solid angle and maximum unambiguous range and velocity, as well as angular, range and velocity resolution. Radar sensors are classified by application, architecture, radar mode, platform, and propagation window.
Geophysical MASINT is a branch of Measurement and Signature Intelligence (MASINT) that involves phenomena transmitted through the earth and manmade structures including emitted or reflected sounds, pressure waves, vibrations, and magnetic field or ionosphere disturbances.

Fisheries acoustics includes a range of research and practical application topics using acoustical devices as sensors in aquatic environments. Acoustical techniques can be applied to sensing aquatic animals, zooplankton, and physical and biological habitat characteristics.
Underwater searches are procedures to find a known or suspected target object or objects in a specified search area under water. They may be carried out underwater by divers, manned submersibles, remotely operated underwater vehicles, or autonomous underwater vehicles, or from the surface by other agents, including surface vessels, aircraft and cadaver dogs.