Circle that passes through the vertices of a triangle
In geometry, the circumscribed circle or circumcircle of a triangle is a circle that passes through all three vertices. The center of this circle is called the circumcenter of the triangle, and its radius is called the circumradius. The circumcenter is the point of intersection between the three perpendicular bisectors of the triangle's sides, and is a triangle center.
Construction of the circumcircle of triangle △ABC and the circumcenter Q
The circumcenter of a triangle can be constructed by drawing any two of the three perpendicular bisectors. For three non-collinear points, these two lines cannot be parallel, and the circumcenter is the point where they cross. Any point on the bisector is equidistant from the two points that it bisects, from which it follows that this point, on both bisectors, is equidistant from all three triangle vertices. The circumradius is the distance from it to any of the three vertices.
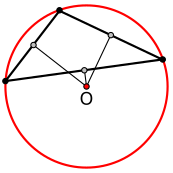
Alternative construction
Alternative construction of the circumcenter (intersection of broken lines)
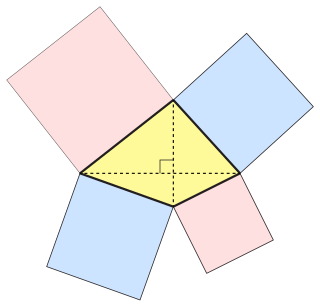
An alternative method to determine the circumcenter is to draw any two lines each one departing from one of the vertices at an angle with the common side, the common angle of departure being 90° minus the angle of the opposite vertex. (In the case of the opposite angle being obtuse, drawing a line at a negative angle means going outside the triangle.)
In coastal navigation, a triangle's circumcircle is sometimes used as a way of obtaining a position line using a sextant when no compass is available. The horizontal angle between two landmarks defines the circumcircle upon which the observer lies.
Circumcircle equations
Cartesian coordinates
In the Euclidean plane, it is possible to give explicitly an equation of the circumcircle in terms of the Cartesian coordinates of the vertices of the inscribed triangle. Suppose that
are the coordinates of points A, B, C. The circumcircle is then the locus of points in the Cartesian plane satisfying the equations
guaranteeing that the points A, B, C, v are all the same distance r from the common center of the circle. Using the polarization identity, these equations reduce to the condition that the matrix
has a nonzero kernel. Thus the circumcircle may alternatively be described as the locus of zeros of the determinant of this matrix:
we then have where and – assuming the three points were not in a line (otherwise the circumcircle is that line that can also be seen as a generalized circle with S at infinity) – giving the circumcenter and the circumradius A similar approach allows one to deduce the equation of the circumsphere of a tetrahedron.
Hence, given the radius, r, center, Pc, a point on the circle, P0 and a unit normal of the plane containing the circle, one parametric equation of the circle starting from the point P0 and proceeding in a positively oriented (i.e., right-handed) sense about is the following:
Additionally, the circumcircle of a triangle embedded in three dimensions can be found using a generalized method. Let A, B, C be three-dimensional points, which form the vertices of a triangle. We start by transposing the system to place C at the origin:
The circumradius r is then
where θ is the interior angle between a and b. The circumcenter, p0, is given by
This formula only works in three dimensions as the cross product is not defined in other dimensions, but it can be generalized to the other dimensions by replacing the cross products with following identities:
This gives us the following equation for the circumradius r:
and the following equation for the cicumcenter p0:
Without loss of generality this can be expressed in a simplified form after translation of the vertex A to the origin of the Cartesian coordinate systems, i.e., when In this case, the coordinates of the vertices and represent the vectors from vertex A' to these vertices. Observe that this trivial translation is possible for all triangles and the circumcenter of the triangle △A'B'C' follow as
with
Due to the translation of vertex A to the origin, the circumradius r can be computed as
where a, b, c are edge lengths BC, CA, AB respectively) of the triangle.
In terms of the triangle's angles α, β, γ, the barycentric coordinates of the circumcenter are[3]
Circumcenter vector
Since the Cartesian coordinates of any point are a weighted average of those of the vertices, with the weights being the point's barycentric coordinates normalized to sum to unity, the circumcenter vector can be written as
Here U is the vector of the circumcenter and A, B, C are the vertex vectors. The divisor here equals 16S2 where S is the area of the triangle. As stated previously
Cartesian coordinates from cross- and dot-products
The circumcenter's position depends on the type of triangle:
For an acute triangle (all angles smaller than a right angle), the circumcenter always lies inside the triangle.
For a right triangle, the circumcenter always lies at the midpoint of the hypotenuse. This is one form of Thales' theorem.
For an obtuse triangle (a triangle with one angle bigger than a right angle), the circumcenter always lies outside the triangle.
The circumcenter of an acute triangle is inside the triangle
The circumcenter of a right triangle is at the midpoint of the hypotenuse
The circumcenter of an obtuse triangle is outside the triangle
These locational features can be seen by considering the trilinear or barycentric coordinates given above for the circumcenter: all three coordinates are positive for any interior point, at least one coordinate is negative for any exterior point, and one coordinate is zero and two are positive for a non-vertex point on a side of the triangle.
Angles
The angles which the circumscribed circle forms with the sides of the triangle coincide with angles at which sides meet each other. The side opposite angle α meets the circle twice: once at each end; in each case at angle α (similarly for the other two angles). This is due to the alternate segment theorem, which states that the angle between the tangent and chord equals the angle in the alternate segment.
Triangle centers on the circumcircle
In this section, the vertex angles are labeled A, B, C and all coordinates are trilinear coordinates:
Steiner point: the non-vertex point of intersection of the circumcircle with the Steiner ellipse.
(The Steiner ellipse, with center = centroid (ABC), is the ellipse of least area that passes through A, B, C. An equation for this ellipse is .)
The diameter of the circumcircle, called the circumdiameter and equal to twice the circumradius, can be computed as the length of any side of the triangle divided by the sine of the opposite angle:
As a consequence of the law of sines, it does not matter which side and opposite angle are taken: the result will be the same.
The diameter of the circumcircle can also be expressed as
where a, b, c are the lengths of the sides of the triangle and is the semiperimeter. The expression above is the area of the triangle, by Heron's formula.[5] Trigonometric expressions for the diameter of the circumcircle include[6]
The triangle's nine-point circle has half the diameter of the circumcircle.
In any given triangle, the circumcenter is always collinear with the centroid and orthocenter. The line that passes through all of them is known as the Euler line.
The useful minimum bounding circle of three points is defined either by the circumcircle (where three points are on the minimum bounding circle) or by the two points of the longest side of the triangle (where the two points define a diameter of the circle). It is common to confuse the minimum bounding circle with the circumcircle.
The circumcircle of three collinear points is the line on which the three points lie, often referred to as a circle of infinite radius. Nearly collinear points often lead to numerical instability in computation of the circumcircle.
Circumcircles of triangles have an intimate relationship with the Delaunay triangulation of a set of points.
where r is the incircle radius and R is the circumcircle radius; hence the circumradius is at least twice the inradius (Euler's triangle inequality), with equality only in the equilateral case.[7][8]
The product of the incircle radius and the circumcircle radius of a triangle with sides a, b, c is[11]
With circumradius R, sides a, b, c, and mediansma, mb, mc, we have[12]
If median m, altitude h, and internal bisector t all emanate from the same vertex of a triangle with circumradius R, then[13]
Carnot's theorem states that the sum of the distances from the circumcenter to the three sides equals the sum of the circumradius and the inradius.[14] Here a segment's length is considered to be negative if and only if the segment lies entirely outside the triangle.
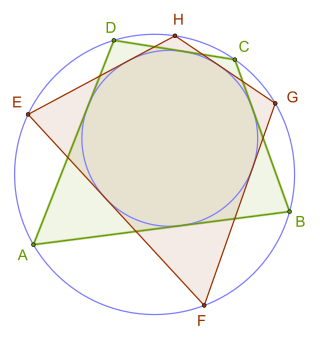
If a triangle has two particular circles as its circumcircle and incircle, there exist an infinite number of other triangles with the same circumcircle and incircle, with any point on the circumcircle as a vertex. (This is the n = 3 case of Poncelet's porism). A necessary and sufficient condition for such triangles to exist is the above equality [15]
A set of points lying on the same circle are called concyclic, and a polygon whose vertices are concyclic is called a cyclic polygon. Every triangle is concyclic, but polygons with more than three sides are not in general.
Cyclic polygons, especially four-sided cyclic quadrilaterals, have various special properties. In particular, the opposite angles of a cyclic quadrilateral are supplementary angles (adding up to 180° or π radians).
In geometry, a tetrahedron, also known as a triangular pyramid, is a polyhedron composed of four triangular faces, six straight edges, and four vertices. The tetrahedron is the simplest of all the ordinary convex polyhedra.
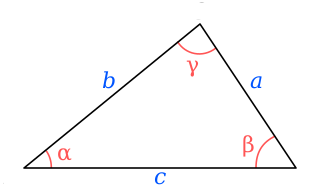
A triangle is a polygon with three corners and three sides, one of the basic shapes in geometry. The corners, also called vertices, are zero-dimensional points while the sides connecting them, also called edges, are one-dimensional line segments. The triangle's interior is a two-dimensional region. Sometimes an arbitrary edge is chosen to be the base, in which case the opposite vertex is called the apex.
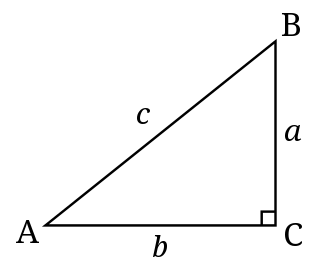
A right triangle or right-angled triangle, sometimes called an orthogonal triangle or rectangular triangle, is a triangle in which two sides are perpendicular, forming a right angle.
In trigonometry, the law of sines, sine law, sine formula, or sine rule is an equation relating the lengths of the sides of any triangle to the sines of its angles. According to the law,
An ellipsoid is a surface that can be obtained from a sphere by deforming it by means of directional scalings, or more generally, of an affine transformation.
In geometry, an altitude of a triangle is a line segment through a vertex and perpendicular to a line containing the side opposite the vertex. This line containing the opposite side is called the extended base of the altitude. The intersection of the extended base and the altitude is called the foot of the altitude. The length of the altitude, often simply called "the altitude", is the distance between the extended base and the vertex. The process of drawing the altitude from the vertex to the foot is known as dropping the altitude at that vertex. It is a special case of orthogonal projection.
In geometry, the incircle or inscribed circle of a triangle is the largest circle that can be contained in the triangle; it touches the three sides. The center of the incircle is a triangle center called the triangle's incenter.
In geometry, an equilateral triangle is a triangle in which all three sides have the same length. In the familiar Euclidean geometry, an equilateral triangle is also equiangular; that is, all three internal angles are also congruent to each other and are each 60°. It is also a regular polygon, so it is also referred to as a regular triangle.
In mechanics and geometry, the 3D rotation group, often denoted SO(3), is the group of all rotations about the origin of three-dimensional Euclidean space under the operation of composition.
Unit quaternions, known as versors, provide a convenient mathematical notation for representing spatial orientations and rotations of elements in three dimensional space. Specifically, they encode information about an axis-angle rotation about an arbitrary axis. Rotation and orientation quaternions have applications in computer graphics, computer vision, robotics, navigation, molecular dynamics, flight dynamics, orbital mechanics of satellites, and crystallographic texture analysis.
In geometry, Heron's formula gives the area of a triangle in terms of the three side lengths Letting be the semiperimeter of the triangle, the area is
In Euclidean geometry, a cyclic quadrilateral or inscribed quadrilateral is a quadrilateral whose vertices all lie on a single circle. This circle is called the circumcircle or circumscribed circle, and the vertices are said to be concyclic. The center of the circle and its radius are called the circumcenter and the circumradius respectively. Other names for these quadrilaterals are concyclic quadrilateral and chordal quadrilateral, the latter since the sides of the quadrilateral are chords of the circumcircle. Usually the quadrilateral is assumed to be convex, but there are also crossed cyclic quadrilaterals. The formulas and properties given below are valid in the convex case.
In geometry, the incenter of a triangle is a triangle center, a point defined for any triangle in a way that is independent of the triangle's placement or scale. The incenter may be equivalently defined as the point where the internal angle bisectors of the triangle cross, as the point equidistant from the triangle's sides, as the junction point of the medial axis and innermost point of the grassfire transform of the triangle, and as the center point of the inscribed circle of the triangle.
In linear algebra, a rotation matrix is a transformation matrix that is used to perform a rotation in Euclidean space. For example, using the convention below, the matrix
An osculating circle is a circle that best approximates the curvature of a curve at a specific point. It is tangent to the curve at that point and has the same curvature as the curve at that point. The osculating circle provides a way to understand the local behavior of a curve and is commonly used in differential geometry and calculus.
In Euclidean geometry, the Fermat point of a triangle, also called the Torricelli point or Fermat–Torricelli point, is a point such that the sum of the three distances from each of the three vertices of the triangle to the point is the smallest possible or, equivalently, the geometric median of the three vertices. It is so named because this problem was first raised by Fermat in a private letter to Evangelista Torricelli, who solved it.
In geometry, various formalisms exist to express a rotation in three dimensions as a mathematical transformation. In physics, this concept is applied to classical mechanics where rotational kinematics is the science of quantitative description of a purely rotational motion. The orientation of an object at a given instant is described with the same tools, as it is defined as an imaginary rotation from a reference placement in space, rather than an actually observed rotation from a previous placement in space.
In geometry, calculating the area of a triangle is an elementary problem encountered often in many different situations. The best known and simplest formula is where b is the length of the base of the triangle, and h is the height or altitude of the triangle. The term "base" denotes any side, and "height" denotes the length of a perpendicular from the vertex opposite the base onto the line containing the base. Euclid proved that the area of a triangle is half that of a parallelogram with the same base and height in his book Elements in 300 BCE. In 499 CE Aryabhata, used this illustrated method in the Aryabhatiya.
In Euclidean geometry, a bicentric quadrilateral is a convex quadrilateral that has both an incircle and a circumcircle. The radii and centers of these circles are called inradius and circumradius, and incenter and circumcenter respectively. From the definition it follows that bicentric quadrilaterals have all the properties of both tangential quadrilaterals and cyclic quadrilaterals. Other names for these quadrilaterals are chord-tangent quadrilateral and inscribed and circumscribed quadrilateral. It has also rarely been called a double circle quadrilateral and double scribed quadrilateral.
In Euclidean geometry, an orthodiagonal quadrilateral is a quadrilateral in which the diagonals cross at right angles. In other words, it is a four-sided figure in which the line segments between non-adjacent vertices are orthogonal (perpendicular) to each other.
↑ Johnson, Roger A. (1929). Modern Geometry: An Elementary Treatise on the Geometry of the Triangle and the Circle. Houghton Mifflin Co. p. 189, #298(d). hdl:2027/wu.89043163211. Republished by Dover Publications as Advanced Euclidean Geometry, 1960 and 2007.
↑ Posamentier, Alfred S.; Lehmann, Ingmar (2012). The Secrets of Triangles. Prometheus Books. pp.289–290.
↑ Altshiller Court, Nathan (1952). College Geometry: An Introduction to the Modern Geometry of the Triangle and the Circle (2nded.). Barnes & Noble. p. 122, #96. Reprinted by Dover Publications, 2007.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.