Related Research Articles

Supervised learning (SL) is a paradigm in machine learning where input objects and a desired output value train a model. The training data is processed, building a function that maps new data on expected output values. An optimal scenario will allow for the algorithm to correctly determine output values for unseen instances. This requires the learning algorithm to generalize from the training data to unseen situations in a "reasonable" way. This statistical quality of an algorithm is measured through the so-called generalization error.
A fuzzy control system is a control system based on fuzzy logic—a mathematical system that analyzes analog input values in terms of logical variables that take on continuous values between 0 and 1, in contrast to classical or digital logic, which operates on discrete values of either 1 or 0.
Fuzzy logic is a form of many-valued logic in which the truth value of variables may be any real number between 0 and 1. It is employed to handle the concept of partial truth, where the truth value may range between completely true and completely false. By contrast, in Boolean logic, the truth values of variables may only be the integer values 0 or 1.

Mathematical optimization or mathematical programming is the selection of a best element, with regard to some criterion, from some set of available alternatives. It is generally divided into two subfields: discrete optimization and continuous optimization. Optimization problems arise in all quantitative disciplines from computer science and engineering to operations research and economics, and the development of solution methods has been of interest in mathematics for centuries.
In computational science, particle swarm optimization (PSO) is a computational method that optimizes a problem by iteratively trying to improve a candidate solution with regard to a given measure of quality. It solves a problem by having a population of candidate solutions, here dubbed particles, and moving these particles around in the search-space according to simple mathematical formula over the particle's position and velocity. Each particle's movement is influenced by its local best known position, but is also guided toward the best known positions in the search-space, which are updated as better positions are found by other particles. This is expected to move the swarm toward the best solutions.
A fitness function is a particular type of objective function that is used to summarise, as a single figure of merit, how close a given design solution is to achieving the set aims. Fitness functions are used in evolutionary algorithms (EA), such as genetic programming and genetic algorithms to guide simulations towards optimal design solutions.
In computer programming, gene expression programming (GEP) is an evolutionary algorithm that creates computer programs or models. These computer programs are complex tree structures that learn and adapt by changing their sizes, shapes, and composition, much like a living organism. And like living organisms, the computer programs of GEP are also encoded in simple linear chromosomes of fixed length. Thus, GEP is a genotype–phenotype system, benefiting from a simple genome to keep and transmit the genetic information and a complex phenotype to explore the environment and adapt to it.

In computational complexity and optimization the no free lunch theorem is a result that states that for certain types of mathematical problems, the computational cost of finding a solution, averaged over all problems in the class, is the same for any solution method. The name alludes to the saying "no such thing as a free lunch", that is, no method offers a "short cut". This is under the assumption that the search space is a probability density function. It does not apply to the case where the search space has underlying structure that can be exploited more efficiently than random search or even has closed-form solutions that can be determined without search at all. For such probabilistic assumptions, the outputs of all procedures solving a particular type of problem are statistically identical. A colourful way of describing such a circumstance, introduced by David Wolpert and William G. Macready in connection with the problems of search and optimization, is to say that there is no free lunch. Wolpert had previously derived no free lunch theorems for machine learning. Before Wolpert's article was published, Cullen Schaffer independently proved a restricted version of one of Wolpert's theorems and used it to critique the current state of machine learning research on the problem of induction.

In the field of artificial intelligence, the designation neuro-fuzzy refers to combinations of artificial neural networks and fuzzy logic.
Type-2 fuzzy sets and systems generalize standard Type-1 fuzzy sets and systems so that more uncertainty can be handled. From the beginning of fuzzy sets, criticism was made about the fact that the membership function of a type-1 fuzzy set has no uncertainty associated with it, something that seems to contradict the word fuzzy, since that word has the connotation of much uncertainty. So, what does one do when there is uncertainty about the value of the membership function? The answer to this question was provided in 1975 by the inventor of fuzzy sets, Lotfi A. Zadeh, when he proposed more sophisticated kinds of fuzzy sets, the first of which he called a "type-2 fuzzy set". A type-2 fuzzy set lets us incorporate uncertainty about the membership function into fuzzy set theory, and is a way to address the above criticism of type-1 fuzzy sets head-on. And, if there is no uncertainty, then a type-2 fuzzy set reduces to a type-1 fuzzy set, which is analogous to probability reducing to determinism when unpredictability vanishes.
In mathematical optimization, the firefly algorithm is a metaheuristic proposed by Xin-She Yang and inspired by the flashing behavior of fireflies.
Design Automation usually refers to electronic design automation, or Design Automation which is a Product Configurator. Extending Computer-Aided Design (CAD), automated design and Computer-Automated Design (CAutoD) are more concerned with a broader range of applications, such as automotive engineering, civil engineering, composite material design, control engineering, dynamic system identification and optimization, financial systems, industrial equipment, mechatronic systems, steel construction, structural optimisation, and the invention of novel systems.
In computer science, an evolving intelligent system is a fuzzy logic system which improves the own performance by evolving rules. The technique is known from machine learning, in which external patterns are learned by an algorithm. Fuzzy logic based machine learning works with neuro-fuzzy systems.
An adaptive neuro-fuzzy inference system or adaptive network-based fuzzy inference system (ANFIS) is a kind of artificial neural network that is based on Takagi–Sugeno fuzzy inference system. The technique was developed in the early 1990s. Since it integrates both neural networks and fuzzy logic principles, it has potential to capture the benefits of both in a single framework.
Fuzzy Markup Language (FML) is a specific purpose markup language based on XML, used for describing the structure and behavior of a fuzzy system independently of the hardware architecture devoted to host and run it.
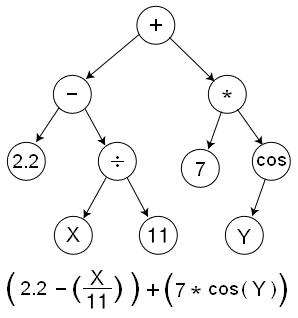
Symbolic regression (SR) is a type of regression analysis that searches the space of mathematical expressions to find the model that best fits a given dataset, both in terms of accuracy and simplicity.
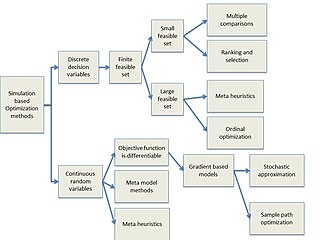
Simulation-based optimization integrates optimization techniques into simulation modeling and analysis. Because of the complexity of the simulation, the objective function may become difficult and expensive to evaluate. Usually, the underlying simulation model is stochastic, so that the objective function must be estimated using statistical estimation techniques.
Machine learning control (MLC) is a subfield of machine learning, intelligent control and control theory which solves optimal control problems with methods of machine learning. Key applications are complex nonlinear systems for which linear control theory methods are not applicable.
In machine learning, hyperparameter optimization or tuning is the problem of choosing a set of optimal hyperparameters for a learning algorithm. A hyperparameter is a parameter whose value is used to control the learning process. By contrast, the values of other parameters are learned.
References
- 1974, E.H. Mamdani, Applications of fuzzy algorithms for control of simple dynamic plant, Proc. IEE 121 1584 - 1588.
- 1995, A. Bastian, I. Hayashi: "An Anticipating Hybrid Genetic Algorithm for Fuzzy Modeling", Journal of Japan Society for Fuzzy Theory and Systems, Vol.10, pp. 801–810
- 1995, Klir, G. B. Yuan, Fuzzy sets and Fuzzy Logic - Theory and Applications, Prentice-Hall.
- 1996, Y. Yuan and H. Zhuang, "A genetic algorithm for generating fuzzy classification rules", Fuzzy Sets and Systems, V. 84, N. 4, pp. 1–19.
- 1998, W. Pedrycz and F. Gomide, An Introduction to Fuzzy Sets: Analysis and Design, MIT Press.
- 2000, A. Bastian: ”Identifying Fuzzy Models utilizing Genetic Programming”, Fuzzy Sets and Systems 113, 333–350.
- 2001, O. Cordón, F. Herrera, F. Gomide, F. Hoffmann and L. Magdalena, Ten years of genetic-fuzzy systems: a current framework and new trends, Proceedings of Joint 9th IFSA World Congress and 20th NAFIPS International Conference, pp. 1241–1246, Vancouver - Canada, 2001.
- 2001, O. Cordon, F. Herrera, F. Hoffmann and L. Magdalena, Genetic Fuzzy Systems. Evolutionary tuning and learning of fuzzy knowledge bases, Advances in Fuzzy Systems: Applications and Theory, World Scientific.
- 1997, H. Ishibuchi, T. Murata, IB. Türkşen, Single-objective and two-objective genetic algorithms for selecting linguistic rules for pattern classification problems, Fuzzy Sets and Systems, V. 89, N. 2, pp. 135–150
- 2007, M. Cococcioni, B. Lazzerini, F. Marcelloni, A Pareto-based multi-objective evolutionary approach to the identification of Mamdani fuzzy systems, Soft Computing, V.11, N.11, pp. 1013–1031
- 2011, M. Cococcioni, B. Lazzerini, F. Marcelloni, On reducing computational overhead in multi-objective genetic Takagi-Sugeno fuzzy systems, Applied Soft Computing V. 11, N. 1, pp. 675–688
- 2013, M. Fazzolari, R. Alcalá, Y. Nojima, H. Ishibuchi, F. Herrera, A Review of the Application of Multiobjective Evolutionary Fuzzy Systems: Current Status and Further Directions, IEEE T. Fuzzy Systems, V. 21, N. 1, pp. 45–65
- The Evolutionary Multiobjective Optimization of Fuzzy Rule-Based Systems Bibliography Page