It is the shortest distance between two points on the surface of a sphere, measured along the surface of the sphere (as opposed to a straight line through the sphere's interior). The distance between two points in Euclidean space is the length of a straight line between them, i.e., the chord's length, but on the sphere there are no straight lines. In spaces with curvature, straight lines are replaced by geodesics. Geodesics on the sphere are circles on the sphere whose centers coincide with the center of the sphere, and are called 'great circles'.
The determination of the great-circle distance is part of the more general problem of great-circle navigation, which also computes the azimuths at the end points and intermediate way-points.
Through any two points on a sphere that are not antipodal points (directly opposite each other), there is a unique great circle. The two points separate the great circle into two arcs. The length of the shorter arc is the great-circle distance between the points. A great circle endowed with such a distance is called a Riemannian circle in Riemannian geometry.
Between antipodal points, there are infinitely many great circles, and all great circle arcs between antipodal points have a length of half the circumference of the circle, or , where r is the radius of the sphere.
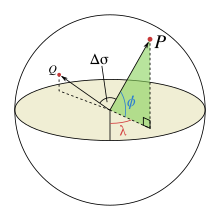
An illustration of the central angle, Δσ, between two points, P and Q. λ and φ are the longitudinal and latitudinal angles of P respectively
Let and be the geographical longitude and latitude of two points 1 and 2, and be their absolute differences; then , the central angle between them, is given by the spherical law of cosines if one of the poles is used as an auxiliary third point on the sphere:[2]
The problem is normally expressed in terms of finding the central angle . Given this angle in radians, the actual arc lengthd on a sphere of radius r can be trivially computed as
Relation between central angle and chord length
The central angle is related with the chord length of unit sphere :
Computational formulae
On computer systems with low floating point precision, the spherical law of cosines formula can have large rounding errors if the distance is small (if the two points are a kilometer apart on the surface of the Earth, the cosine of the central angle is near 0.99999999). For modern 64-bit floating-point numbers, the spherical law of cosines formula, given above, does not have serious rounding errors for distances larger than a few meters on the surface of the Earth.[3] The haversine formula is numerically better-conditioned for small distances by using the chord-length relation:[4]
Historically, the use of this formula was simplified by the availability of tables for the haversine function: hav(θ)=sin2(θ/2).
The following shows the equivalent formula expressing the chord length explicitly:
where .
Although this formula is accurate for most distances on a sphere, it too suffers from rounding errors for the special (and somewhat unusual) case of antipodal points. A formula that is accurate for all distances is the following special case of the Vincenty formula for an ellipsoid with equal major and minor axes:[5]
Here the quadrant for should be governed by the signs of the numerator and denominator of the right hand side, e.g., using the atan2 function.
Vector version
Another representation of similar formulas, but using normal vectors instead of latitude and longitude to describe the positions, is found by means of 3D vector algebra, using the dot product, cross product, or a combination:[6]
where and are the normals to the sphere at the two positions 1 and 2. Similarly to the equations above based on latitude and longitude, the expression based on arctan is the only one that is well-conditioned for all angles. The expression based on arctan requires the magnitude of the cross product over the dot product.
From chord length
A line through three-dimensional space between points of interest on a spherical Earth is the chord of the great circle between the points. The central angle between the two points can be determined from the chord length. The great circle distance is proportional to the central angle.
The great circle chord length, , may be calculated as follows for the corresponding unit sphere, by means of Cartesian subtraction:
Radius for spherical Earth
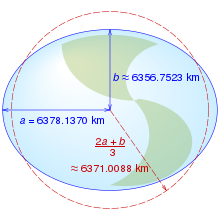
Equatorial (a), polar (b) and mean Earth radii as defined in the 1984 World Geodetic System revision. (Not to scale.)
The shape of the Earth closely resembles a flattened sphere (a spheroid) with equatorial radius of 6378.137km; distance from the center of the spheroid to each pole is 6356.7523142km. When calculating the length of a short north-south line at the equator, the circle that best approximates that line has a radius of (which equals the meridian's semi-latus rectum), or 6335.439km, while the spheroid at the poles is best approximated by a sphere of radius , or 6399.594km, a 1% difference. So long as a spherical Earth is assumed, any single formula for distance on the Earth is only guaranteed correct within 0.5% (though better accuracy is possible if the formula is only intended to apply to a limited area). Using the mean Earth radius, (for the WGS84 ellipsoid) means that in the limit of small flattening, the mean square relative error in the estimates for distance is minimized.[7]
↑ Admiralty Manual of Navigation, Volume 1, The Stationery Office, 1987, p.10, ISBN9780117728806, The errors introduced by assuming a spherical Earth based on the international nautical mile are not more than 0.5% for latitude, 0.2% for longitude.
↑ Kells, Lyman M.; Kern, Willis F.; Bland, James R. (1940). Plane And Spherical Trigonometry. McGraw Hill Book Company, Inc. pp.323-326. Retrieved July 13, 2018.
In physics, the cross section is a measure of the probability that a specific process will take place in a collision of two particles. For example, the Rutherford cross-section is a measure of probability that an alpha particle will be deflected by a given angle during an interaction with an atomic nucleus. Cross section is typically denoted σ (sigma) and is expressed in units of area, more specifically in barns. In a way, it can be thought of as the size of the object that the excitation must hit in order for the process to occur, but more exactly, it is a parameter of a stochastic process.
In mathematical physics and mathematics, the Pauli matrices are a set of three 2 × 2 complex matrices that are Hermitian, involutory and unitary. Usually indicated by the Greek letter sigma, they are occasionally denoted by tau when used in connection with isospin symmetries.
In astronomy, coordinate systems are used for specifying positions of celestial objects relative to a given reference frame, based on physical reference points available to a situated observer. Coordinate systems in astronomy can specify an object's position in three-dimensional space or plot merely its direction on a celestial sphere, if the object's distance is unknown or trivial.
An ellipsoid is a surface that can be obtained from a sphere by deforming it by means of directional scalings, or more generally, of an affine transformation.
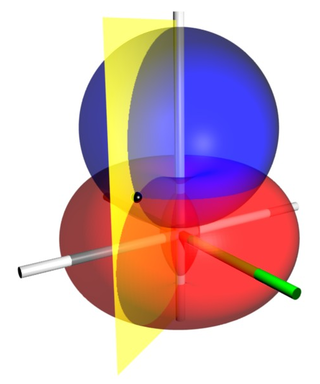
In mathematics and physical science, spherical harmonics are special functions defined on the surface of a sphere. They are often employed in solving partial differential equations in many scientific fields. The table of spherical harmonics contains a list of common spherical harmonics.
In navigation, a rhumb line, rhumb, or loxodrome is an arc crossing all meridians of longitude at the same angle, that is, a path with constant bearing as measured relative to true north.
In probability theory, the Borel–Kolmogorov paradox is a paradox relating to conditional probability with respect to an event of probability zero. It is named after Émile Borel and Andrey Kolmogorov.
The haversine formula determines the great-circle distance between two points on a sphere given their longitudes and latitudes. Important in navigation, it is a special case of a more general formula in spherical trigonometry, the law of haversines, that relates the sides and angles of spherical triangles.
Orthographic projection in cartography has been used since antiquity. Like the stereographic projection and gnomonic projection, orthographic projection is a perspective projection in which the sphere is projected onto a tangent plane or secant plane. The point of perspective for the orthographic projection is at infinite distance. It depicts a hemisphere of the globe as it appears from outer space, where the horizon is a great circle. The shapes and areas are distorted, particularly near the edges.
In mathematics, a Killing vector field, named after Wilhelm Killing, is a vector field on a Riemannian manifold that preserves the metric. Killing fields are the infinitesimal generators of isometries; that is, flows generated by Killing fields are continuous isometries of the manifold. More simply, the flow generates a symmetry, in the sense that moving each point of an object the same distance in the direction of the Killing vector will not distort distances on the object.
The solar zenith angle is the zenith angle of the sun, i.e., the angle between the sun’s rays and the vertical direction. It is the complement to the solar altitude or solar elevation, which is the altitude angle or elevation angle between the sun’s rays and a horizontal plane. At solar noon, the zenith angle is at a minimum and is equal to latitude minus solar declination angle. This is the basis by which ancient mariners navigated the oceans.
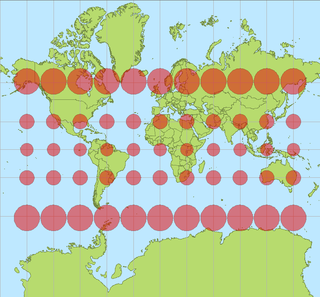
In cartography, a Tissot's indicatrix is a mathematical contrivance presented by French mathematician Nicolas Auguste Tissot in 1859 and 1871 in order to characterize local distortions due to map projection. It is the geometry that results from projecting a circle of infinitesimal radius from a curved geometric model, such as a globe, onto a map. Tissot proved that the resulting diagram is an ellipse whose axes indicate the two principal directions along which scale is maximal and minimal at that point on the map.
Great-circle navigation or orthodromic navigation is the practice of navigating a vessel along a great circle. Such routes yield the shortest distance between two points on the globe.
Bispherical coordinates are a three-dimensional orthogonal coordinate system that results from rotating the two-dimensional bipolar coordinate system about the axis that connects the two foci. Thus, the two foci and in bipolar coordinates remain points in the bispherical coordinate system.
The n-vector representation is a three-parameter non-singular representation well-suited for replacing geodetic coordinates for horizontal position representation in mathematical calculations and computer algorithms.
The Cassini projection is a map projection first described in an approximate form by César-François Cassini de Thury in 1745. Its precise formulas were found through later analysis by Johann Georg von Soldner around 1810. It is the transverse aspect of the equirectangular projection, in that the globe is first rotated so the central meridian becomes the "equator", and then the normal equirectangular projection is applied. Considering the earth as a sphere, the projection is composed of the operations:
The General Perspective projection is a map projection. When the Earth is photographed from space, the camera records the view as a perspective projection. When the camera is aimed toward the center of the Earth, the resulting projection is called Vertical Perspective. When aimed in other directions, the resulting projection is called a Tilted Perspective.
A great ellipse is an ellipse passing through two points on a spheroid and having the same center as that of the spheroid. Equivalently, it is an ellipse on the surface of a spheroid and centered on the origin, or the curve formed by intersecting the spheroid by a plane through its center. For points that are separated by less than about a quarter of the circumference of the earth, about , the length of the great ellipse connecting the points is close to the geodesic distance. The great ellipse therefore is sometimes proposed as a suitable route for marine navigation. The great ellipse is special case of an earth section path.
Vincenty's formulae are two related iterative methods used in geodesy to calculate the distance between two points on the surface of a spheroid, developed by Thaddeus Vincenty (1975a). They are based on the assumption that the figure of the Earth is an oblate spheroid, and hence are more accurate than methods that assume a spherical Earth, such as great-circle distance.
Geographical distance or geodetic distance is the distance measured along the surface of the Earth, or the shortest arch length.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.