Subsumption architecture is a reactive robotic architecture heavily associated with behavior-based robotics which was very popular in the 1980s and 90s. The term was introduced by Rodney Brooks and colleagues in 1986. Subsumption has been widely influential in autonomous robotics and elsewhere in real-time AI.

James Sacra Albus was an American engineer, Senior NIST Fellow and founder and former chief of the Intelligent Systems Division of the Manufacturing Engineering Laboratory at the National Institute of Standards and Technology (NIST).
Cougaar is a Java agent architecture.
In cognitive science, a cognitive architecture refers to both a theory about the structure of the human mind and to a computational instantiation of such a theory used in the fields of artificial intelligence (AI) and computational cognitive science. One of the main goals of a cognitive architecture is to summarize the various results of cognitive psychology in a comprehensive computer model. However, the results need to be formalized so far as they can be the basis of a computer program. The formalized models can be used to further refine a comprehensive theory of cognition, and more immediately, as a commercially usable model. Successful cognitive architectures include ACT-R and SOAR.

IDEF0, a compound acronym, is a function modeling methodology for describing manufacturing functions, which offers a functional modeling language for the analysis, development, reengineering, and integration of information systems; business processes; or software engineering analysis.
Hybrid intelligent system denotes a software system which employs, in parallel, a combination of methods and techniques from artificial intelligence subfields, such as:
A hierarchy is an arrangement of units into related levels of different weights or ranks, meaning that levels are considered "higher" or "lower" than one another. The term, which originally meant rule by priests, is now generalised and describes systems with a linear concept of subordinates and superiors and where each level has only 1 direct parent level. Hierarchies are typically depicted as a tree structures.
Action selection is a way of characterizing the most basic problem of intelligent systems: what to do next. In artificial intelligence and computational cognitive science, "the action selection problem" is typically associated with intelligent agents and animats—artificial systems that exhibit complex behaviour in an agent environment. The term is also sometimes used in ethology or animal behavior.
In artificial intelligence, a procedural reasoning system (PRS) is a framework for constructing real-time reasoning systems that can perform complex tasks in dynamic environments. It is based on the notion of a rational agent or intelligent agent using the belief–desire–intention software model.

The Real-time Control System (RCS) is a software system developed by NIST based on the Real-time Control System Reference Model Architecture, that implements a generic Hierarchical control system. The RCS Software Library is an archive of free C++, Java and Ada code, scripts, tools, makefiles, and documentation developed to aid programmers of software to be used in real-time control systems.
Psi-theory, developed by Dietrich Dörner at the University of Bamberg, is a systemic psychological theory covering human action regulation, intention selection and emotion. It models the human mind as an information processing agent, controlled by a set of basic physiological, social and cognitive drives. Perceptual and cognitive processing are directed and modulated by these drives, which allow the autonomous establishment and pursuit of goals in an open environment.

NIST Enterprise Architecture Model is a late-1980s reference model for enterprise architecture. It defines an enterprise architecture by the interrelationship between an enterprise's business, information, and technology environments.

Behavior trees are a formal, graphical modelling language used primarily in systems and software engineering. Behavior trees employ a well-defined notation to unambiguously represent the hundreds or even thousands of natural language requirements that are typically used to express the stakeholder needs for a large-scale software-integrated system.
MIBE architecture is a behavior-based robot architecture developed at Artificial Intelligence and Robotics Lab of Politecnico di Milano by Fabio La Daga and Andrea Bonarini in 1998. MIBE architecture is based on the idea of animat and derived from subsumption architecture, formerly developed by Rodney Brooks and colleagues at MIT in 1986.

The 4D/RCS Reference Model Architecture is a reference model for military unmanned vehicles on how their software components should be identified and organized.
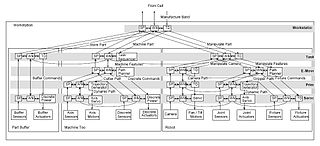
Real-time Control System (RCS) is a reference model architecture, suitable for many software-intensive, real-time computing control problem domains. It defines the types of functions needed in a real-time intelligent control system, and how these functions relate to each other.
In artificial intelligence research, the situated approach builds agents that are designed to behave effectively successfully in their environment. This requires designing AI "from the bottom-up" by focussing on the basic perceptual and motor skills required to survive. The situated approach gives a much lower priority to abstract reasoning or problem-solving skills.
LinuxCNC is a free, open-source Linux software system that implements numerical control capability using general purpose computers to control CNC machines. Designed by various volunteer developers at linuxcnc.org, it is typically bundled as an ISO file with a modified version of 32-bit Ubuntu Linux which provides the required real-time kernel.

A behavior tree is a mathematical model of plan execution used in computer science, robotics, control systems and video games. They describe switchings between a finite set of tasks in a modular fashion. Their strength comes from their ability to create very complex tasks composed of simple tasks, without worrying how the simple tasks are implemented. Behavior trees present some similarities to hierarchical state machines with the key difference that the main building block of a behavior is a task rather than a state. Its ease of human understanding make behavior trees less error prone and very popular in the game developer community. Behavior trees have been shown to generalize several other control architectures. Mathematically, they are directed acyclic graphs.
This glossary of artificial intelligence is a list of definitions of terms and concepts relevant to the study of artificial intelligence, its sub-disciplines, and related fields. Related glossaries include Glossary of computer science, Glossary of robotics, and Glossary of machine vision.

