Distributed Artificial Intelligence (DAI) also called Decentralized Artificial Intelligence is a subfield of artificial intelligence research dedicated to the development of distributed solutions for problems. DAI is closely related to and a predecessor of the field of multi-agent systems.

Boids is an artificial life program, developed by Craig Reynolds in 1986, which simulates the flocking behaviour of birds, and related group motion. His paper on this topic was published in 1987 in the proceedings of the ACM SIGGRAPH conference. The name "boid" corresponds to a shortened version of "bird-oid object", which refers to a bird-like object. Reynolds' boid model is one example of a larger general concept, for which many other variations have been developed since. The closely related work of Ichiro Aoki is noteworthy because it was published in 1982 — five years before Reynolds' boids paper.
In computer science, a software agent is a computer program that acts for a user or another program in a relationship of agency.

Simultaneous localization and mapping (SLAM) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. While this initially appears to be a chicken or the egg problem, there are several algorithms known to solve it in, at least approximately, tractable time for certain environments. Popular approximate solution methods include the particle filter, extended Kalman filter, covariance intersection, and GraphSLAM. SLAM algorithms are based on concepts in computational geometry and computer vision, and are used in robot navigation, robotic mapping and odometry for virtual reality or augmented reality.
An agent-based model (ABM) is a computational model for simulating the actions and interactions of autonomous agents in order to understand the behavior of a system and what governs its outcomes. It combines elements of game theory, complex systems, emergence, computational sociology, multi-agent systems, and evolutionary programming. Monte Carlo methods are used to understand the stochasticity of these models. Particularly within ecology, ABMs are also called individual-based models (IBMs). A review of recent literature on individual-based models, agent-based models, and multiagent systems shows that ABMs are used in many scientific domains including biology, ecology and social science. Agent-based modeling is related to, but distinct from, the concept of multi-agent systems or multi-agent simulation in that the goal of ABM is to search for explanatory insight into the collective behavior of agents obeying simple rules, typically in natural systems, rather than in designing agents or solving specific practical or engineering problems.

Swarm robotics is an approach to the coordination of multiple robots as a system which consist of large numbers of mostly simple physical robots. ″In a robot swarm, the collective behavior of the robots results from local interactions between the robots and between the robots and the environment in which they act.″ It is supposed that a desired collective behavior emerges from the interactions between the robots and interactions of robots with the environment. This approach emerged on the field of artificial swarm intelligence, as well as the biological studies of insects, ants and other fields in nature, where swarm behaviour occurs.
A blackboard system is an artificial intelligence approach based on the blackboard architectural model, where a common knowledge base, the "blackboard", is iteratively updated by a diverse group of specialist knowledge sources, starting with a problem specification and ending with a solution. Each knowledge source updates the blackboard with a partial solution when its internal constraints match the blackboard state. In this way, the specialists work together to solve the problem. The blackboard model was originally designed as a way to handle complex, ill-defined problems, where the solution is the sum of its parts.
The belief–desire–intention software model (BDI) is a software model developed for programming intelligent agents. Superficially characterized by the implementation of an agent's beliefs, desires and intentions, it actually uses these concepts to solve a particular problem in agent programming. In essence, it provides a mechanism for separating the activity of selecting a plan from the execution of currently active plans. Consequently, BDI agents are able to balance the time spent on deliberating about plans and executing those plans. A third activity, creating the plans in the first place (planning), is not within the scope of the model, and is left to the system designer and programmer.

In intelligence and artificial intelligence, an intelligent agent (IA) is an agent acting in an intelligent manner; It perceives its environment, takes actions autonomously in order to achieve goals, and may improve its performance with learning or acquiring knowledge. An intelligent agent may be simple or complex: A thermostat or other control system is considered an example of an intelligent agent, as is a human being, as is any system that meets the definition, such as a firm, a state, or a biome.
Ekaterini Panagiotou Sycara is a Greek computer scientist. She is an Edward Fredkin Research Professor of Robotics in the Robotics Institute, School of Computer Science at Carnegie Mellon University internationally known for her research in artificial intelligence, particularly in the fields of negotiation, autonomous agents and multi-agent systems. She directs the Advanced Agent-Robotics Technology Lab at Robotics Institute, Carnegie Mellon University. She also serves as academic advisor for PhD students at both Robotics Institute and Tepper School of Business.

Ronald Craig Arkin is an American roboticist and roboethicist, and a Regents' Professor in the School of Interactive Computing, College of Computing at the Georgia Institute of Technology. He is known for the motor schema technique in robot navigation and for his book Behavior-Based Robotics.
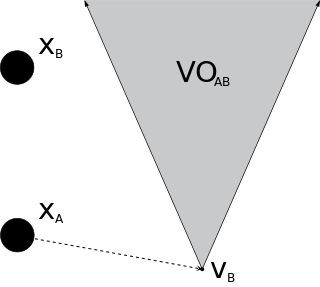
In robotics and motion planning, a velocity obstacle, commonly abbreviated VO, is the set of all velocities of a robot that will result in a collision with another robot at some moment in time, assuming that the other robot maintains its current velocity. If the robot chooses a velocity inside the velocity obstacle then the two robots will eventually collide, if it chooses a velocity outside the velocity obstacle, such a collision is guaranteed not to occur.
Agent-oriented programming (AOP) is a programming paradigm where the construction of the software is centered on the concept of software agents. In contrast to object-oriented programming which has objects at its core, AOP has externally specified agents at its core. They can be thought of as abstractions of objects. Exchanged messages are interpreted by receiving "agents", in a way specific to its class of agents.

Juan Pavón is a Spanish computer scientist, full professor of the Complutense University of Madrid (UCM). He is a pioneer researcher in the field of Software Agents, co-creator of the FIPA MESSAGE and INGENIAS methodologies, and founder and director of the research group GRASIA: GRoup of Agent-based, Social and Interdisciplinary Applications at UCM. He is known for his work in the field of Artificial Intelligence, specifically in agent-oriented software engineering. He has been often cited by mainstream media, as a reference in Artificial Intelligence.
Cloud robotics is a field of robotics that attempts to invoke cloud technologies such as cloud computing, cloud storage, and other Internet technologies centered on the benefits of converged infrastructure and shared services for robotics. When connected to the cloud, robots can benefit from the powerful computation, storage, and communication resources of modern data center in the cloud, which can process and share information from various robots or agent. Humans can also delegate tasks to robots remotely through networks. Cloud computing technologies enable robot systems to be endowed with powerful capability whilst reducing costs through cloud technologies. Thus, it is possible to build lightweight, low-cost, smarter robots with an intelligent "brain" in the cloud. The "brain" consists of data center, knowledge base, task planners, deep learning, information processing, environment models, communication support, etc.
Agent mining is an interdisciplinary area that synergizes multiagent systems with data mining and machine learning.

Michael John Wooldridge is a professor of computer science at the University of Oxford. His main research interests is in multi-agent systems, and in particular, in the computational theory aspects of rational action in systems composed of multiple self-interested agents. His work is characterised by the use of techniques from computational logic, game theory, and social choice theory.

GAMA is a simulation platform with a complete modelling and simulation integrated development environment (IDE) for building spatially explicit agent-based simulations.

Aude G. Billard is a Swiss physicist in the fields of machine learning and human-robot interactions. As a full professor at the School of Engineering at Swiss Federal Institute of Technology in Lausanne (EPFL), Billard’s research focuses on applying machine learning to support robot learning through human guidance. Billard’s work on human-robot interactions has been recognized numerous times by the Institute of Electrical and Electronics Engineers (IEEE) and she currently holds a leadership position on the executive committee of the IEEE Robotics and Automation Society (RAS) as the vice president of publication activities.

Lyle Norman Long is an academic, and computational scientist. He is a Professor Emeritus of Computational Science, Mathematics, and Engineering at The Pennsylvania State University, and is most known for developing algorithms and software for mathematical models, including neural networks, and robotics. His research has been focused in the fields of computational science, computational neuroscience, cognitive robotics, parallel computing, and software engineering.

