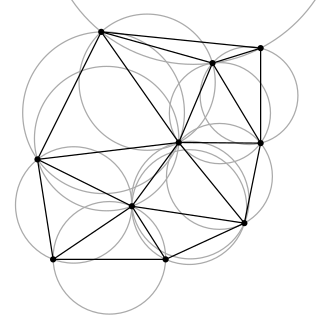
In mathematics and computational geometry, a Delaunay triangulation for a given set P of discrete points in a general position is a triangulation DT(P) such that no point in P is inside the circumcircle of any triangle in DT(P). Delaunay triangulations maximize the minimum of all the angles of the triangles in the triangulation; they tend to avoid sliver triangles. The triangulation is named after Boris Delaunay for his work on this topic from 1934.

In geometry, a simplex is a generalization of the notion of a triangle or tetrahedron to arbitrary dimensions. The simplex is so-named because it represents the simplest possible polytope in any given dimension. For example,

In geometry, the convex hull or convex envelope or convex closure of a shape is the smallest convex set that contains it. The convex hull may be defined either as the intersection of all convex sets containing a given subset of a Euclidean space, or equivalently as the set of all convex combinations of points in the subset. For a bounded subset of the plane, the convex hull may be visualized as the shape enclosed by a rubber band stretched around the subset.
In mathematics, a simplicial complex is a set composed of points, line segments, triangles, and their n-dimensional counterparts. Simplicial complexes should not be confused with the more abstract notion of a simplicial set appearing in modern simplicial homotopy theory. The purely combinatorial counterpart to a simplicial complex is an abstract simplicial complex. To distinguish a simplicial from an abstract simplicial complex, the former is often called a geometric simplicial complex.
In mathematics, a building is a combinatorial and geometric structure which simultaneously generalizes certain aspects of flag manifolds, finite projective planes, and Riemannian symmetric spaces. Buildings were initially introduced by Jacques Tits as a means to understand the structure of exceptional groups of Lie type. The more specialized theory of Bruhat–Tits buildings plays a role in the study of p-adic Lie groups analogous to that of the theory of symmetric spaces in the theory of Lie groups.
In the mathematical disciplines of topology and geometry, an orbifold is a generalization of a manifold. Roughly speaking, an orbifold is a topological space which is locally a finite group quotient of a Euclidean space.

In mathematics, the barycentric subdivision is a standard way to subdivide a given simplex into smaller ones. Its extension on simplicial complexes is a canonical method to refine them. Therefore, the barycentric subdivision is an important tool in algebraic topology.

In geometry, an arrangement of lines is the subdivision of the plane formed by a collection of lines. Bounds on the complexity of arrangements have been studied in discrete geometry, and computational geometers have found algorithms for the efficient construction of arrangements.

A Euclidean minimum spanning tree of a finite set of points in the Euclidean plane or higher-dimensional Euclidean space connects the points by a system of line segments with the points as endpoints, minimizing the total length of the segments. In it, any two points can reach each other along a path through the line segments. It can be found as the minimum spanning tree of a complete graph with the points as vertices and the Euclidean distances between points as edge weights.
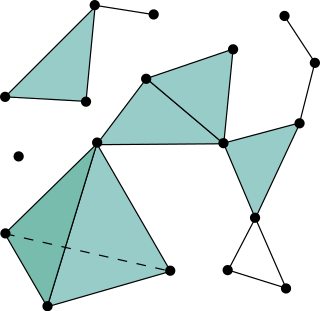
In geometry, a triangulation is a subdivision of a planar object into triangles, and by extension the subdivision of a higher-dimension geometric object into simplices. Triangulations of a three-dimensional volume would involve subdividing it into tetrahedra packed together.

In mathematics, triangulation describes the replacement of topological spaces by piecewise linear spaces, i.e. the choice of a homeomorphism in a suitable simplicial complex. Spaces being homeomorphic to a simplicial complex are called triangulable. Triangulation has various uses in different branches of mathematics, for instance in algebraic topology, in complex analysis or in modeling.

A convex polytope is a special case of a polytope, having the additional property that it is also a convex set contained in the -dimensional Euclidean space . Most texts use the term "polytope" for a bounded convex polytope, and the word "polyhedron" for the more general, possibly unbounded object. Others allow polytopes to be unbounded. The terms "bounded/unbounded convex polytope" will be used below whenever the boundedness is critical to the discussed issue. Yet other texts identify a convex polytope with its boundary.
Medoids are representative objects of a data set or a cluster within a data set whose sum of dissimilarities to all the objects in the cluster is minimal. Medoids are similar in concept to means or centroids, but medoids are always restricted to be members of the data set. Medoids are most commonly used on data when a mean or centroid cannot be defined, such as graphs. They are also used in contexts where the centroid is not representative of the dataset like in images and 3-D trajectories and gene expression. These are also of interest while wanting to find a representative using some distance other than squared euclidean distance.

In electrical engineering and computer science, Lloyd's algorithm, also known as Voronoi iteration or relaxation, is an algorithm named after Stuart P. Lloyd for finding evenly spaced sets of points in subsets of Euclidean spaces and partitions of these subsets into well-shaped and uniformly sized convex cells. Like the closely related k-means clustering algorithm, it repeatedly finds the centroid of each set in the partition and then re-partitions the input according to which of these centroids is closest. In this setting, the mean operation is an integral over a region of space, and the nearest centroid operation results in Voronoi diagrams.

The closest pair of points problem or closest pair problem is a problem of computational geometry: given points in metric space, find a pair of points with the smallest distance between them. The closest pair problem for points in the Euclidean plane was among the first geometric problems that were treated at the origins of the systematic study of the computational complexity of geometric algorithms.
In statistics and computational geometry, the notion of centerpoint is a generalization of the median to data in higher-dimensional Euclidean space. Given a set of points in d-dimensional space, a centerpoint of the set is a point such that any hyperplane that goes through that point divides the set of points in two roughly equal subsets: the smaller part should have at least a 1/(d + 1) fraction of the points. Like the median, a centerpoint need not be one of the data points. Every non-empty set of points has at least one centerpoint.
An ε-net in computational geometry is the approximation of a general set by a collection of simpler subsets. In probability theory it is the approximation of one probability distribution by another.
In geometry, the moment curve is an algebraic curve in d-dimensional Euclidean space given by the set of points with Cartesian coordinates of the form
In mathematics, an abstract cell complex is an abstract set with Alexandrov topology in which a non-negative integer number called dimension is assigned to each point. The complex is called “abstract” since its points, which are called “cells”, are not subsets of a Hausdorff space as is the case in Euclidean and CW complexes. Abstract cell complexes play an important role in image analysis and computer graphics.
In geometry, it is an unsolved conjecture of Hugo Hadwiger that every simplex can be dissected into orthoschemes, using a number of orthoschemes bounded by a function of the dimension of the simplex. If true, then more generally every convex polytope could be dissected into orthoschemes.














