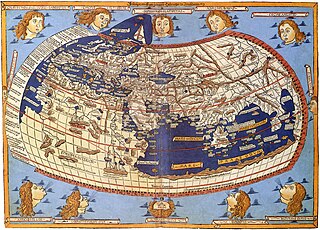
Cartography is the study and practice of making and using maps. Combining science, aesthetics and technique, cartography builds on the premise that reality can be modeled in ways that communicate spatial information effectively.
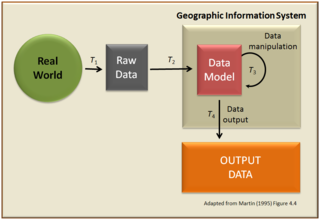
A geographic information system (GIS) consists of integrated computer hardware and software that store, manage, analyze, edit, output, and visualize geographic data. Much of this often happens within a spatial database, however, this is not essential to meet the definition of a GIS. In a broader sense, one may consider such a system also to include human users and support staff, procedures and workflows, the body of knowledge of relevant concepts and methods, and institutional organizations.

A map is a symbolic depiction emphasizing relationships between elements of some space, such as objects, regions, or themes.
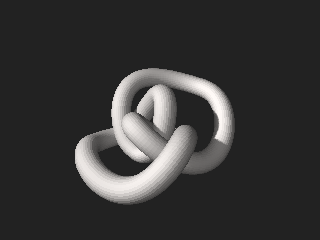
In mathematics, topology is concerned with the properties of a geometric object that are preserved under continuous deformations, such as stretching, twisting, crumpling, and bending; that is, without closing holes, opening holes, tearing, gluing, or passing through itself.
In cartography, a map projection is any of a broad set of transformations employed to represent the curved two-dimensional surface of a globe on a plane. In a map projection, coordinates, often expressed as latitude and longitude, of locations from the surface of the globe are transformed to coordinates on a plane. Projection is a necessary step in creating a two-dimensional map and is one of the essential elements of cartography.

A digital elevation model (DEM) or digital surface model (DSM) is a 3D computer graphics representation of elevation data to represent terrain or overlaying objects, commonly of a planet, moon, or asteroid. A "global DEM" refers to a discrete global grid. DEMs are used often in geographic information systems (GIS), and are the most common basis for digitally produced relief maps. A digital terrain model (DTM) represents specifically the ground surface while DEM and DSM may represent tree top canopy or building roofs.
Robotic mapping is a discipline related to computer vision and cartography. The goal for an autonomous robot is to be able to construct a map or floor plan and to localize itself and its recharging bases or beacons in it. Robotic mapping is that branch which deals with the study and application of ability to localize itself in a map / plan and sometimes to construct the map or floor plan by the autonomous robot.

Simultaneous localization and mapping (SLAM) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. While this initially appears to be a chicken or the egg problem, there are several algorithms known to solve it in, at least approximately, tractable time for certain environments. Popular approximate solution methods include the particle filter, extended Kalman filter, covariance intersection, and GraphSLAM. SLAM algorithms are based on concepts in computational geometry and computer vision, and are used in robot navigation, robotic mapping and odometry for virtual reality or augmented reality.
Algorithmic topology, or computational topology, is a subfield of topology with an overlap with areas of computer science, in particular, computational geometry and computational complexity theory.
In topology, a branch of mathematics, a topological manifold is a topological space that locally resembles real n-dimensional Euclidean space. Topological manifolds are an important class of topological spaces, with applications throughout mathematics. All manifolds are topological manifolds by definition. Other types of manifolds are formed by adding structure to a topological manifold. Every manifold has an "underlying" topological manifold, obtained by simply "forgetting" the added structure. However, not every topological manifold can be endowed with a particular additional structure. For example, the E8 manifold is a topological manifold which cannot be endowed with a differentiable structure.
Mark Stephen Monmonier is a Distinguished Professor of Geography and the Environment at the Maxwell School of Citizenship and Public Affairs of Syracuse University. He specializes in toponymy, geography, and geographic information systems.

Web mapping or an online mapping is the process of using, creating, and distributing maps on the World Wide Web, usually through the use of Web geographic information systems. A web map or an online map is both served and consumed, thus, web mapping is more than just web cartography, it is a service where consumers may choose what the map will show.

Geography is a field of science devoted to the study of the lands, features, inhabitants, and phenomena of Earth. Geography is an all-encompassing discipline that seeks an understanding of Earth and its human and natural complexities—not merely where objects are, but also how they have changed and come to be. While geography is specific to Earth, many concepts can be applied more broadly to other celestial bodies in the field of planetary science. Geography has been called "a bridge between natural science and social science disciplines."

Computer cartography is the art, science, and technology of making and using maps with a computer. This technology represents a paradigm shift in how maps are produced, but is still fundamentally a subset of traditional cartography. The primary function of this technology is to produce maps, including creation of accurate representations of a particular area such as, detailing major road arteries and other points of interest for navigation, and in the creation of thematic maps. Computer cartography is one of the main functions of geographic information systems (GIS), however, GIS is not necessary to facilitate computer cartography and has functions beyond just making maps. The first peer-reviewed publications on using computers to help in the cartographic process predate the introduction of full GIS by several years.
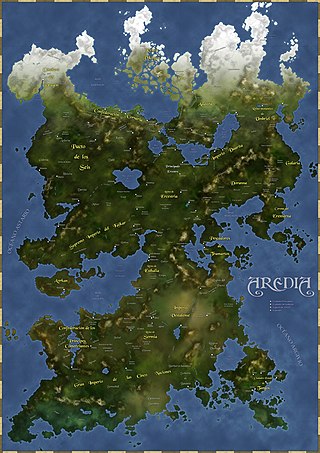
Fantasy cartography,fictional map-making, or geofiction is a type of map design that visually presents an imaginary world or concept, or represents a real-world geography in a fantastic style. Fantasy cartography usually manifests from worldbuilding and often corresponds to narratives within the fantasy and science fiction genres. Stefan Ekman says that, "a [regular] map re-presents what is already there; a fictional map is often primary – to create the map means, largely, to create the world of the map."
The OpenStreetMap Foundation is a non-profit foundation whose aim is to support and enable the development of freely-reusable geospatial data. Founded in 2006, it is closely connected with the OpenStreetMap project, although its constitution does not prevent it supporting other projects.
Cynthia A. Brewer is an American cartographer, author, and professor of geography at Pennsylvania State University. Brewer's specialism relates to visibility and color theory in cartography and, in 2023, she was awarded the International Cartographic Society's highest honor, the Carl Mannerfelt Gold Medal, for her distinguished contribution to the field.
In the branch of mathematics called functional analysis, a complemented subspace of a topological vector space is a vector subspace for which there exists some other vector subspace of called its (topological) complement in , such that is the direct sum in the category of topological vector spaces. Formally, topological direct sums strengthen the algebraic direct sum by requiring certain maps be continuous; the result retains many nice properties from the operation of direct sum in finite-dimensional vector spaces.

Internet GIS, or Internet geographic information system (GIS), is a term that refers to a broad set of technologies and applications that employ the Internet to access, analyze, visualize, and distribute spatial data. Internet GIS is an outgrowth of traditional GIS, and represents a shift from conducting GIS on an individual computer to working with remotely distributed data and functions. Two major issues in GIS are accessing and distributing spatial data and GIS outputs. Internet GIS helps to solve that problem by allowing users to access vast databases impossible to store on a single desktop computer, and by allowing rapid dissemination of both maps and raw data to others. These methods include both file sharing and email. This has enabled the general public to participate in map creation and make use of GIS technology.

Web GIS, or Web Geographic Information Systems, are GIS that employ the World Wide Web to facilitate the storage, visualization, analysis, and distribution of spatial information over the Internet. The World Wide Web, or the Web, is an information system that uses the internet to host, share, and distribute documents, images, and other data. Web GIS involves using the World Wide Web to facilitate GIS tasks traditionally done on a desktop computer, as well as enabling the sharing of maps and spatial data. While Web GIS and Internet GIS are sometimes used interchangeably, they are different concepts. Web GIS is a subset of Internet GIS, which is itself a subset of distributed GIS, which itself is a subset of broader Geographic information system. The most common application of Web GIS is Web mapping, so much so that the two terms are often used interchangeably in much the same way as Digital mapping and GIS. However, Web GIS and web mapping are distinct concepts, with web mapping not necessarily requiring a Web GIS.

