This article needs additional citations for verification .(January 2013) |
In algebra, a primordial element is a particular kind of a vector in a vector space.
This article needs additional citations for verification .(January 2013) |
In algebra, a primordial element is a particular kind of a vector in a vector space.
Let be a vector space over a field and let be an -indexed basis of vectors for By the definition of a basis, every vector can be expressed uniquely as
for some -indexed family of scalars where all but finitely many are zero. Let
denote the set of all indices for which the expression of has a nonzero coefficient. Given a subspace of a nonzero vector is said to be primordial if it has both of the following two properties: [1]
In mathematics, any vector space has a corresponding dual vector space consisting of all linear forms on together with the vector space structure of pointwise addition and scalar multiplication by constants.
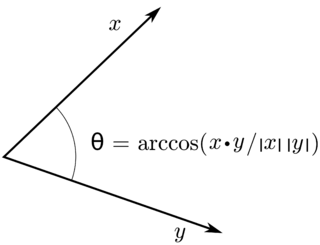
In mathematics, an inner product space is a real vector space or a complex vector space with an operation called an inner product. The inner product of two vectors in the space is a scalar, often denoted with angle brackets such as in . Inner products allow formal definitions of intuitive geometric notions, such as lengths, angles, and orthogonality of vectors. Inner product spaces generalize Euclidean vector spaces, in which the inner product is the dot product or scalar product of Cartesian coordinates. Inner product spaces of infinite dimension are widely used in functional analysis. Inner product spaces over the field of complex numbers are sometimes referred to as unitary spaces. The first usage of the concept of a vector space with an inner product is due to Giuseppe Peano, in 1898.
In mathematics, and more specifically in linear algebra, a linear map is a mapping between two vector spaces that preserves the operations of vector addition and scalar multiplication. The same names and the same definition are also used for the more general case of modules over a ring; see Module homomorphism.

In mathematics, a set B of vectors in a vector space V is called a basis if every element of V may be written in a unique way as a finite linear combination of elements of B. The coefficients of this linear combination are referred to as components or coordinates of the vector with respect to B. The elements of a basis are called basis vectors.
In mathematics, the tensor product of two vector spaces V and W is a vector space to which is associated a bilinear map that maps a pair to an element of denoted .

In mathematics and physics, a vector space is a set whose elements, often called vectors, may be added together and multiplied ("scaled") by numbers called scalars. Scalars are often real numbers, but can be complex numbers or, more generally, elements of any field. The operations of vector addition and scalar multiplication must satisfy certain requirements, called vector axioms. Real vector space and complex vector space are kinds of vector spaces based on different kinds of scalars: real coordinate space or complex coordinate space.
In linear algebra, the trace of a square matrix A, denoted tr(A), is defined to be the sum of elements on the main diagonal of A. The trace is only defined for a square matrix.
In mathematics, a topological vector space is one of the basic structures investigated in functional analysis. A topological vector space is a vector space that is also a topological space with the property that the vector space operations are also continuous functions. Such a topology is called a vector topology and every topological vector space has a uniform topological structure, allowing a notion of uniform convergence and completeness. Some authors also require that the space is a Hausdorff space. One of the most widely studied categories of TVSs are locally convex topological vector spaces. This article focuses on TVSs that are not necessarily locally convex. Banach spaces, Hilbert spaces and Sobolev spaces are other well-known examples of TVSs.

In mathematics, and more specifically in linear algebra, a linear subspace or vector subspace is a vector space that is a subset of some larger vector space. A linear subspace is usually simply called a subspace when the context serves to distinguish it from other types of subspaces.

In the theory of vector spaces, a set of vectors is said to be linearly independent if there exists no nontrivial linear combination of the vectors that equals the zero vector. If such a linear combination exists, then the vectors are said to be linearly dependent. These concepts are central to the definition of dimension.
In mathematics, a linear form is a linear map from a vector space to its field of scalars.
In mathematics, the operator norm measures the "size" of certain linear operators by assigning each a real number called its operator norm. Formally, it is a norm defined on the space of bounded linear operators between two given normed vector spaces. Informally, the operator norm of a linear map is the maximum factor by which it "lengthens" vectors.
In mathematics, a symplectic vector space is a vector space V over a field F equipped with a symplectic bilinear form.
In mathematics, a free module is a module that has a basis, that is, a generating set consisting of linearly independent elements. Every vector space is a free module, but, if the ring of the coefficients is not a division ring, then there exist non-free modules.
In mathematics, a homogeneous function is a function of several variables such that the following holds: If each of the function's arguments is multiplied by the same scalar, then the function's value is multiplied by some power of this scalar; the power is called the degree of homogeneity, or simply the degree. That is, if k is an integer, a function f of n variables is homogeneous of degree k if

In mathematics, an ordered basis of a vector space of finite dimension n allows representing uniquely any element of the vector space by a coordinate vector, which is a sequence of n scalars called coordinates. If two different bases are considered, the coordinate vector that represents a vector v on one basis is, in general, different from the coordinate vector that represents v on the other basis. A change of basis consists of converting every assertion expressed in terms of coordinates relative to one basis into an assertion expressed in terms of coordinates relative to the other basis.
In linear algebra, given a vector space with a basis of vectors indexed by an index set , the dual set of is a set of vectors in the dual space with the same index set such that and form a biorthogonal system. The dual set is always linearly independent but does not necessarily span . If it does span , then is called the dual basis or reciprocal basis for the basis .
This page lists some examples of vector spaces. See vector space for the definitions of terms used on this page. See also: dimension, basis.

In mathematics, Hilbert spaces allow the methods of linear algebra and calculus to be generalized from (finite-dimensional) Euclidean vector spaces to spaces that may be infinite-dimensional. Hilbert spaces arise naturally and frequently in mathematics and physics, typically as function spaces. Formally, a Hilbert space is a vector space equipped with an inner product that induces a distance function for which the space is a complete metric space.
This is a glossary for the terminology in a mathematical field of functional analysis.
| Basic concepts |  | |
|---|---|---|
| Matrices | ||
| Bilinear | ||
| Multilinear algebra | ||
| Vector space constructions | ||
| Numerical | ||
| | This linear algebra-related article is a stub. You can help Wikipedia by expanding it. |


















