In digital logic and computing, a counter is a device which stores the number of times a particular event or process has occurred, often in relationship to a clock. The most common type is a sequential digital logic circuit with an input line called the clock and multiple output lines. The values on the output lines represent a number in the binary or BCD number system. Each pulse applied to the clock input increments or decrements the number in the counter.
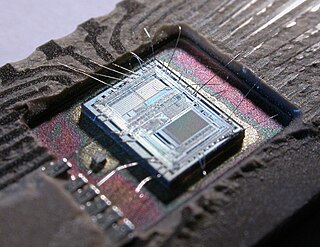
A microcontroller or microcontroller unit (MCU) is a small computer on a single integrated circuit. A microcontroller contains one or more CPUs along with memory and programmable input/output peripherals. Program memory in the form of NOR flash, OTP ROM or ferroelectric RAM is also often included on chip, as well as a small amount of RAM. Microcontrollers are designed for embedded applications, in contrast to the microprocessors used in personal computers or other general purpose applications consisting of various discrete chips.

A universal asynchronous receiver-transmitter is a peripheral device for asynchronous serial communication in which the data format and transmission speeds are configurable. It sends data bits one by one, from the least significant to the most significant, framed by start and stop bits so that precise timing is handled by the communication channel. The electric signaling levels are handled by a driver circuit external to the UART. Common signal levels are RS-232, RS-485, and raw TTL for short debugging links. Early teletypewriters used current loops.

The Intel 8085 ("eighty-eighty-five") is an 8-bit microprocessor produced by Intel and introduced in March 1976. It is the last 8-bit microprocessor developed by Intel.

AVR is a family of microcontrollers developed since 1996 by Atmel, acquired by Microchip Technology in 2016. These are modified Harvard architecture 8-bit RISC single-chip microcontrollers. AVR was one of the first microcontroller families to use on-chip flash memory for program storage, as opposed to one-time programmable ROM, EPROM, or EEPROM used by other microcontrollers at the time.

The MSP430 is a mixed-signal microcontroller family from Texas Instruments, first introduced on 14 February 1992. Built around a 16-bit CPU, the MSP430 was designed for low power consumption embedded applications and low cost.
Serial Peripheral Interface (SPI) is a de facto standard for synchronous serial communication, used primarily in embedded systems for short-distance wired communication between integrated circuits.
JTAG is an industry standard for verifying designs of and testing printed circuit boards after manufacture.

The MOS Technology 6522 Versatile Interface Adapter (VIA) is an integrated circuit that was designed and manufactured by MOS Technology as an I/O port controller for the 6502 family of microprocessors. It provides two bidirectional 8-bit parallel I/O ports, two 16-bit timers, and an 8-bit shift register for serial communications or data conversion between serial and parallel forms. The direction of each bit of the two I/O ports can be individually programmed. In addition to being manufactured by MOS Technology, the 6522 was second sourced by other companies including Rockwell and Synertek.
A general-purpose input/output (GPIO) is an uncommitted digital signal pin on an integrated circuit or electronic circuit board which may be used as an input or output, or both, and is controllable by software.
Clock skew is a phenomenon in synchronous digital circuit systems in which the same sourced clock signal arrives at different components at different times due to gate or, in more advanced semiconductor technology, wire signal propagation delay. The instantaneous difference between the readings of any two clocks is called their skew.
XDR DRAM is a high-performance dynamic random-access memory interface. It is based on and succeeds RDRAM. Competing technologies include DDR2 and GDDR4.
The original Macintosh was a relatively simple machine, now of interest for its simplicity and for the fact that it was the first computer produced by Apple under the name Macintosh. The Macintosh used standard off-the-shelf components to the greatest extent possible, achieving a moderate price point by mixing complex LSI chips, readily customizable programmable array logic, and off-the-shelf components.
A Serializer/Deserializer (SerDes) is a pair of functional blocks commonly used in high speed communications to compensate for limited input/output. These blocks convert data between serial data and parallel interfaces in each direction. The term "SerDes" generically refers to interfaces used in various technologies and applications. The primary use of a SerDes is to provide data transmission over a single line or a differential pair in order to minimize the number of I/O pins and interconnects.

The Intel 8255 Programmable Peripheral Interface (PPI) chip was developed and manufactured by Intel in the first half of the 1970s for the Intel 8080 microprocessor. The 8255 provides 24 parallel input/output lines with a variety of programmable operating modes.
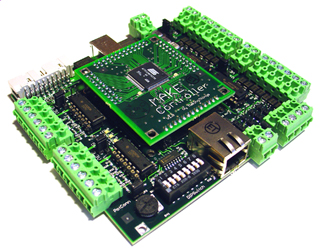
A single-board microcontroller is a microcontroller built onto a single printed circuit board. This board provides all of the circuitry necessary for a useful control task: a microprocessor, I/O circuits, a clock generator, RAM, stored program memory and any necessary support ICs. The intention is that the board is immediately useful to an application developer, without requiring them to spend time and effort to develop controller hardware.

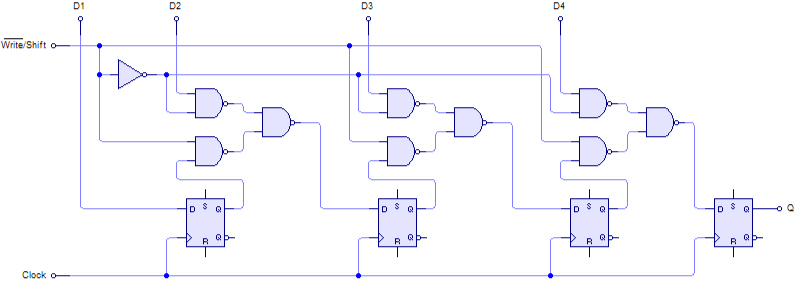
In electronics, flip-flops and latches are circuits that have two stable states that can store state information – a bistable multivibrator. The circuit can be made to change state by signals applied to one or more control inputs and will output its state. It is the basic storage element in sequential logic. Flip-flops and latches are fundamental building blocks of digital electronics systems used in computers, communications, and many other types of systems.
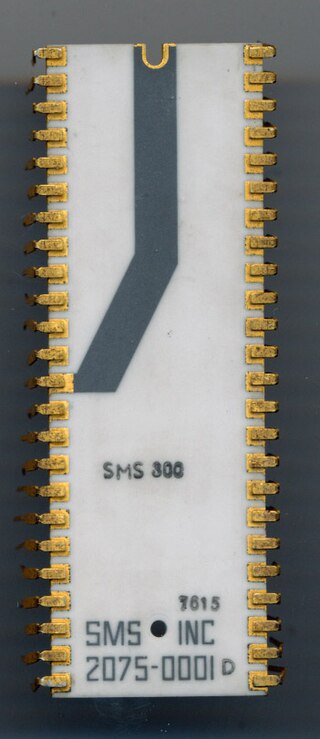
The 8X300 is a microprocessor produced and marketed by Signetics starting 1976 as a second source for the SMS 300 by Scientific Micro Systems, Inc. Although SMS developed the SMS 300, Signetics was the sole manufacturer of this product line. In 1978 Signetics purchased the rights to the SMS 300 series and renamed it 8X300.

The COP400 or COP II is a 4-bit microcontroller family introduced in 1977 by National Semiconductor as a follow-on product to their original PMOS COP microcontroller. COP400 family members are complete microcomputers containing internal timing, logic, ROM, RAM, and I/O necessary to implement dedicated controllers. Some COP400 devices were second-sourced by Western Digital as the WD4200 family. In the Soviet Union several COP400 microcontrollers were manufactured as the 1820 series.


{kind=link}