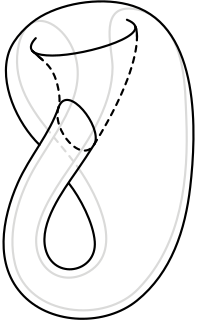
In topology, a branch of mathematics, the Klein bottle is an example of a non-orientable surface; it is a two-dimensional manifold against which a system for determining a normal vector cannot be consistently defined. Informally, it is a one-sided surface which, if traveled upon, could be followed back to the point of origin while flipping the traveler upside down. Other related non-orientable objects include the Möbius strip and the real projective plane. While a Möbius strip is a surface with boundary, a Klein bottle has no boundary. For comparison, a sphere is an orientable surface with no boundary.
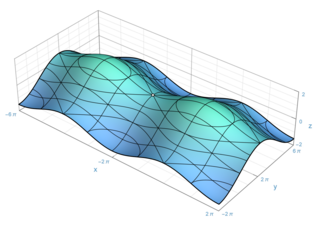
In the part of mathematics referred to as topology, a surface is a two-dimensional manifold. Some surfaces arise as the boundaries of three-dimensional solids; for example, the sphere is the boundary of the solid ball. Other surfaces arise as graphs of functions of two variables; see the figure at right. However, surfaces can also be defined abstractly, without reference to any ambient space. For example, the Klein bottle is a surface that cannot be embedded in three-dimensional Euclidean space.
In mathematics, homology is a general way of associating a sequence of algebraic objects, such as abelian groups or modules, with other mathematical objects such as topological spaces. Homology groups were originally defined in algebraic topology. Similar constructions are available in a wide variety of other contexts, such as abstract algebra, groups, Lie algebras, Galois theory, and algebraic geometry.

In mathematics, particularly in complex analysis, a Riemann surface is a connected one-dimensional complex manifold. These surfaces were first studied by and are named after Bernhard Riemann. Riemann surfaces can be thought of as deformed versions of the complex plane: locally near every point they look like patches of the complex plane, but the global topology can be quite different. For example, they can look like a sphere or a torus or several sheets glued together.

In mathematics, orientability is a property of some topological spaces such as real vector spaces, Euclidean spaces, surfaces, and more generally manifolds that allows a consistent definition of "clockwise" and "counterclockwise". A space is orientable if such a consistent definition exists. In this case, there are two possible definitions, and a choice between them is an orientation of the space. Real vector spaces, Euclidean spaces, and spheres are orientable. A space is non-orientable if "clockwise" is changed into "counterclockwise" after running through some loops in it, and coming back to the starting point. This means that a geometric shape, such as , that moves continuously along such a loop is changed into its own mirror image . A Möbius strip is an example of a non-orientable space.

In mathematics, specifically in topology, the operation of connected sum is a geometric modification on manifolds. Its effect is to join two given manifolds together near a chosen point on each. This construction plays a key role in the classification of closed surfaces.
This is a glossary of terms specific to differential geometry and differential topology. The following three glossaries are closely related:
In mathematics, geometric topology is the study of manifolds and maps between them, particularly embeddings of one manifold into another.

In mathematics, low-dimensional topology is the branch of topology that studies manifolds, or more generally topological spaces, of four or fewer dimensions. Representative topics are the structure theory of 3-manifolds and 4-manifolds, knot theory, and braid groups. This can be regarded as a part of geometric topology. It may also be used to refer to the study of topological spaces of dimension 1, though this is more typically considered part of continuum theory.
In the mathematical field of geometric topology, a Heegaard splitting is a decomposition of a compact oriented 3-manifold that results from dividing it into two handlebodies.
In mathematics, an incompressible surface is a surface properly embedded in a 3-manifold, which, in intuitive terms, is a "nontrivial" surface that cannot be simplified. In non-mathematical terms, the surface of a suitcase is compressible, because we could cut the handle and shrink it into the surface. But a Conway sphere is incompressible, because there are essential parts of a knot or link both inside and out, so there is no way to move the entire knot or link to one side of the punctured sphere. The mathematical definition is as follows. There are two cases to consider. A sphere is incompressible if both inside and outside the sphere there are some obstructions that prevent the sphere from shrinking to a point and also prevent the sphere from expanding to encompass all of space. A surface other than a sphere is incompressible if any disk with its boundary on the surface spans a disk in the surface.
In mathematics, real projective space, or RPn or , is the topological space of lines passing through the origin 0 in Rn+1. It is a compact, smooth manifold of dimension n, and is a special case Gr(1, Rn+1) of a Grassmannian space.

In mathematics, a 3-manifold is a space that locally looks like Euclidean 3-dimensional space. A 3-manifold can be thought of as a possible shape of the universe. Just as a sphere looks like a plane to a small enough observer, all 3-manifolds look like our universe does to a small enough observer. This is made more precise in the definition below.
In mathematics, a fundamental polygon can be defined for every compact Riemann surface of genus greater than 0. It encodes not only the topology of the surface through its fundamental group but also determines the Riemann surface up to conformal equivalence. By the uniformization theorem, every compact Riemann surface has simply connected universal covering surface given by exactly one of the following:

In mathematics, a manifold is a topological space that locally resembles Euclidean space near each point. More precisely, an -dimensional manifold, or -manifold for short, is a topological space with the property that each point has a neighborhood that is homeomorphic to an open subset of -dimensional Euclidean space.
In mathematics, transversality is a notion that describes how spaces can intersect; transversality can be seen as the "opposite" of tangency, and plays a role in general position. It formalizes the idea of a generic intersection in differential topology. It is defined by considering the linearizations of the intersecting spaces at the points of intersection.

In mathematics, an immersion is a differentiable function between differentiable manifolds whose differential is everywhere injective. Explicitly, f : M → N is an immersion if

In mathematics, the differential geometry of surfaces deals with the differential geometry of smooth surfaces with various additional structures, most often, a Riemannian metric. Surfaces have been extensively studied from various perspectives: extrinsically, relating to their embedding in Euclidean space and intrinsically, reflecting their properties determined solely by the distance within the surface as measured along curves on the surface. One of the fundamental concepts investigated is the Gaussian curvature, first studied in depth by Carl Friedrich Gauss, who showed that curvature was an intrinsic property of a surface, independent of its isometric embedding in Euclidean space.
In topology, a branch of mathematics, a prime manifold is an n-manifold that cannot be expressed as a non-trivial connected sum of two n-manifolds. Non-trivial means that neither of the two is an n-sphere. A similar notion is that of an irreduciblen-manifold, which is one in which any embedded (n − 1)-sphere bounds an embedded n-ball. Implicit in this definition is the use of a suitable category, such as the category of differentiable manifolds or the category of piecewise-linear manifolds.
In mathematics, a genus g surface is a surface formed by the connected sum of g many tori: the interior of a disk is removed from each of g many tori and the boundaries of the g many disks are identified, forming a g-torus. The genus of such a surface is g.





