Related Research Articles

Leslie B. Lamport is an American computer scientist and mathematician. Lamport is best known for his seminal work in distributed systems, and as the initial developer of the document preparation system LaTeX and the author of its first manual.
Swarm intelligence (SI) is the collective behavior of decentralized, self-organized systems, natural or artificial. The concept is employed in work on artificial intelligence. The expression was introduced by Gerardo Beni and Jing Wang in 1989, in the context of cellular robotic systems.

A multi-agent system is a computerized system composed of multiple interacting intelligent agents. Multi-agent systems can solve problems that are difficult or impossible for an individual agent or a monolithic system to solve. Intelligence may include methodic, functional, procedural approaches, algorithmic search or reinforcement learning.
A Byzantine fault is a condition of a computer system, particularly distributed computing systems, where components may fail and there is imperfect information on whether a component has failed. The term takes its name from an allegory, the "Byzantine generals problem", developed to describe a situation in which, in order to avoid catastrophic failure of the system, the system's actors must agree on a concerted strategy, but some of these actors are unreliable.
Model predictive control (MPC) is an advanced method of process control that is used to control a process while satisfying a set of constraints. It has been in use in the process industries in chemical plants and oil refineries since the 1980s. In recent years it has also been used in power system balancing models and in power electronics. Model predictive controllers rely on dynamic models of the process, most often linear empirical models obtained by system identification. The main advantage of MPC is the fact that it allows the current timeslot to be optimized, while keeping future timeslots in account. This is achieved by optimizing a finite time-horizon, but only implementing the current timeslot and then optimizing again, repeatedly, thus differing from a linear–quadratic regulator (LQR). Also MPC has the ability to anticipate future events and can take control actions accordingly. PID controllers do not have this predictive ability. MPC is nearly universally implemented as a digital control, although there is research into achieving faster response times with specially designed analog circuitry.
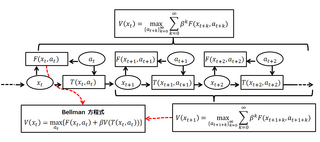
A Bellman equation, named after Richard E. Bellman, is a necessary condition for optimality associated with the mathematical optimization method known as dynamic programming. It writes the "value" of a decision problem at a certain point in time in terms of the payoff from some initial choices and the "value" of the remaining decision problem that results from those initial choices. This breaks a dynamic optimization problem into a sequence of simpler subproblems, as Bellman's “principle of optimality" prescribes. The equation applies to algebraic structures with a total ordering; for algebraic structures with a partial ordering, the generic Bellman's equation can be used.
A fundamental problem in distributed computing and multi-agent systems is to achieve overall system reliability in the presence of a number of faulty processes. This often requires coordinating processes to reach consensus, or agree on some data value that is needed during computation. Example applications of consensus include agreeing on what transactions to commit to a database in which order, state machine replication, and atomic broadcasts. Real-world applications often requiring consensus include cloud computing, clock synchronization, PageRank, opinion formation, smart power grids, state estimation, control of UAVs, load balancing, blockchain, and others.
A wireless ad hoc network (WANET) or mobile ad hoc network (MANET) is a decentralized type of wireless network. The network is ad hoc because it does not rely on a pre-existing infrastructure, such as routers or wireless access points. Instead, each node participates in routing by forwarding data for other nodes. The determination of which nodes forward data is made dynamically on the basis of network connectivity and the routing algorithm in use.
Reza Olfati-Saber is an Iranian roboticist and Assistant Professor of Engineering at the Thayer School of Engineering at Dartmouth College. Olfati-Saber is an internationally renowned expert in the control and coordination of multi-robot formations. He has also worked in mobile sensor networks, and innovative educational and outreach activities in robotics for disaster management and rescue operations.
A networked control system (NCS) is a control system wherein the control loops are closed through a communication network. The defining feature of an NCS is that control and feedback signals are exchanged among the system's components in the form of information packages through a network.
Dragoslav D. Šiljak is Professor Emeritus of Electrical Engineering at Santa Clara University, where he held the title of Benjamin and Mae Swig University Professor. He is best known for developing the mathematical theory and methods for control of complex dynamic systems characterized by large-scale, information structure constraints and uncertainty.

Wassim Michael Haddad is a Lebanese-Greek-American applied mathematician, scientist, and engineer, with research specialization in the areas of dynamical systems and control. His research has led to fundamental breakthroughs in applied mathematics, thermodynamics, stability theory, robust control, dynamical system theory, and neuroscience. Professor Haddad is a member of the faculty of the School of Aerospace Engineering at Georgia Institute of Technology, where he holds the rank of Professor and Chair of the Flight Mechanics and Control Discipline. Dr. Haddad is a member of the Academy of Nonlinear Sciences for recognition of paramount contributions to the fields of nonlinear stability theory, nonlinear dynamical systems, and nonlinear control and an IEEE Fellow for contributions to robust, nonlinear, and hybrid control systems.
Ji-Feng Zhang was born in Shandong, China. He is currently the vice-chair of the technical board of the International Federation of Automatic Control (IFAC), the vice-president of the Systems Engineering Society of China (SESC), the vice-president of the Chinese Association of Automation (CAA), the chair of the technical committee on Control Theory (CAA), and the editor-in-chief for both All About Systems and Control and the Journal of Systems Science and Mathematical Sciences.

Soumitro Banerjee is an Indian electrical engineer and a professor at the Department of Physical Sciences of the Indian Institute of Science Education and Research, Kolkata. He is known for his studies on bifurcation phenomena in power electronic circuits and is an elected fellow of all three major Indian science academies: the National Academy of Sciences, India, Indian Academy of Sciences, and Indian National Science Academy. He is also a fellow of The World Academy of Sciences, Institute of Electrical and Electronics Engineers, West Bengal Academy of Sciences and the Indian National Academy of Engineering. The Council of Scientific and Industrial Research, the apex agency of the Government of India for scientific research, awarded him the Shanti Swarup Bhatnagar Prize for Science and Technology, one of the highest Indian science awards for his contributions to Engineering Sciences in 2003.
Karl Henrik Johansson is a Swedish researcher and best known for his pioneering contributions to networked control systems, cyber-physical systems, and hybrid systems. His research has had particular application impact in transportation, automation, and energy networks. He holds a Chaired Professorship in Networked Control at the KTH Royal Institute of Technology in Stockholm, Sweden. He is Director of KTH Digital Futures.

Roberto Tempo was an Italian scientist, known for his studies on complex networked systems in information technology.
Nano is a cryptocurrency characterized by a directed acyclic graph data structure and distributed ledger, making it possible for Nano to work without intermediaries. To agree on what transactions to commit, it uses a voting system with weight based on the amount of currency an account holds.
Hamidou Tembine is a French game theorist and researcher specializing in evolutionary games and co-opetitive mean-field-type games. He has been a Global Network Assistant Professor at New York University. He has been also the principal investigator and director of the Game Theory and Learning Laboratory at New York University.
Can Emre Koksal is an electrical engineer, computer scientist, academic, and entrepreneur. He is the Founder and CEO of Datanchor, and a professor of Electrical and Computer Engineering at Ohio State University.
References
- ↑ Ren, Wei; Beard, R. W.; Atkins, E. M. (8–10 June 2005). "A survey of consensus problems in multi-agent coordination". Proceedings of the 2005, American Control Conference, 2005. pp. 1859–64. CiteSeerX 10.1.1.70.6311 . doi:10.1109/ACC.2005.1470239. ISBN 978-0-7803-9098-0. S2CID 17011922.
- ↑ Olfati-Saber, R. (13 March 2006). "Flocking for multi-agent dynamic systems: Algorithms and theory". IEEE Transactions on Automatic Control. 51 (3): 401–20. CiteSeerX 10.1.1.135.5931 . doi:10.1109/TAC.2005.864190. S2CID 517188.
- ↑ Balch, T.; Arkin, R. C. (December 1998). "Behavior-based formation control for multirobot teams". IEEE Transactions on Robotics and Automation. 14 (6): 926–39. CiteSeerX 10.1.1.71.6632 . doi:10.1109/70.736776.
- ↑ Silaghi, Marius C.; Yokoo, Makoto (2007). "Distributed Constraint Reasoning" (PDF). Encyclopedia of Artificial Intelligence. Information Science Reference.
- ↑ Gregor Betz (15 August 2012). Debate Dynamics: How Controversy Improves Our Beliefs. Springer Science & Business Media. pp. 189–. ISBN 978-94-007-4599-5.
- Ghapani, S.; Mei, J.; Ren, W.; Song, Y. (2016), "Fully distributed flocking with a moving leader for lagrange networks with parametric uncertainties", Automatica, 67–76, doi:10.1016/j.automatica.2016.01.004
- Shamma, Jeff S. (2008). Cooperative Control of Distributed Multi-Agent Systems. Wiley-Interscience. ISBN 978-0-470-06031-5.