In mathematics, physics, engineering and systems theory, a dynamical system is the description of how a system evolves in time. We express our observables as numbers and we record them over time.[1]
For example an astronomer can experimentally record the positions of how the planets move in the sky, and this can be considered a complete enough description of a dynamical system. In the case of planets there is also enough knowledge to codify this information as a set of differential equations with initial conditions, or as a map from the present state to a future state in a predefined state space with a time parameter t , or as an orbit in phase space.[2]
The concept of a dynamical system has its origins in Newtonian mechanics and more precisely in celestial mechanics. There, as in other natural sciences and engineering disciplines, there is some need to predict the evolution of the system, but maybe also pose other questions such as stability, qualitative or long term behaviour, dependence on parameters, existence of periodic, stochastic or chaotic behaviour.[9] The relation from one state and another is either explicit such as a function in the parameter t predicting position and velocity of a particle or implicit such as a differential equation, difference equation or other time scale. Some times it may not be possible to define such a description, there may not even be a differential equation predicting stock price, or it maybe impossible to build one but still talk stock prices can be considered a dynamical system based on experimental data changing over time.[10]
If the system can be solved, then, given an initial point, it is possible to determine all its future positions, a collection of points known as a trajectory or orbit.
Before the advent of computers, finding an orbit required sophisticated mathematical techniques and could be accomplished only for a small class of dynamical systems.[13] Numerical methods implemented on electronic computing machines have simplified the task of determining the orbits of a dynamical system.[14]
For simple dynamical systems, knowing the trajectory is often sufficient, but most dynamical systems are too complicated to be understood in terms of individual trajectories. The difficulties arise because:
The systems studied may only be known approximately—the parameters of the system may not be known precisely or terms may be missing from the equations. The approximations used bring into question the validity or relevance of numerical solutions. To address these questions several notions of stability have been introduced in the study of dynamical systems, such as Lyapunov stability or structural stability. The stability of the dynamical system implies that there is a class of models or initial conditions for which the trajectories would be equivalent. The operation for comparing orbits to establish their equivalence changes with the different notions of stability.[15]
The type of trajectory may be more important than one particular trajectory. Some trajectories may be periodic, whereas others may wander through many different states of the system. Applications often require enumerating these classes or maintaining the system within one class. Classifying all possible trajectories has led to the qualitative study of dynamical systems, that is, properties that do not change under coordinate changes. Linear dynamical systems and systems that have two numbers describing a state are examples of dynamical systems where the possible classes of orbits are understood.[16]
The behavior of trajectories as a function of a parameter may be what is needed for an application. As a parameter is varied, the dynamical systems may have bifurcation points where the qualitative behavior of the dynamical system changes. For example, it may go from having only periodic motions to apparently erratic behavior, as in the transition to turbulence of a fluid.[17]
The trajectories of the system may appear erratic, as if random. In these cases it may be necessary to compute averages using one very long trajectory or many different trajectories. The averages are well defined for ergodic systems and a more detailed understanding has been worked out for hyperbolic systems. Understanding the probabilistic aspects of dynamical systems has helped establish the foundations of statistical mechanics and of chaos.[18]
Three body problem: Approximate trajectories of three identical bodies located at the vertices of a scalene triangle and having zero initial velocities.
Arnold cat map: picture showing how the linear map stretches the unit square and how its pieces are rearranged when the modulo operation is performed. The lines with the arrows show the direction of the contracting and expanding eigenspaces
Baker's map: Example of a measure that is invariant under the action of the (unrotated) baker's map: an invariant measure. Applying the baker's map to this image always results in exactly the same image.
Billiards: A particle moving inside the Bunimovich stadium, a well-known chaotic billiard.
The recursive application of a Complex quadratic polynomial as a complex plane map gives a Dynamical system. Here there is a Dynamical plane with a Julia set and critical orbit.
A two-dimensional Poincaré section of the forced Duffing equation
Many people regard French mathematician Henri Poincaré as the founder of dynamical systems.[19] Poincaré published two now classical monographs, "New Methods of Celestial Mechanics" (1892–1899) and "Lectures on Celestial Mechanics" (1905–1910). In them, he successfully applied the results of their research to the problem of the motion of three bodies and studied in detail the behavior of solutions (frequency, stability, asymptotic, and so on). These papers included the Poincaré recurrence theorem, which states that certain systems will, after a sufficiently long but finite time, return to a state very close to the initial state. [20]
Aleksandr Lyapunov developed many important approximation methods. His methods, which he developed in 1899, make it possible to define the stability of sets of ordinary differential equations. He created the modern theory of the stability of a dynamical system. [21]
The Smale horseshoe mapf is the composition of three geometrical transformations.
Stephen Smale made significant advances as well. His first contribution was the Smale horseshoe that jumpstarted significant research in dynamical systems. He also outlined a research program carried out by many others.
From a mathematics perspective in the most general case the state space X is treated as a generic set of abstract algebra. This space X has a semi-group structure on it (i.e. where only associativity is required) and there is most often a natural choice for an Identity element, which is typically attached to the origin of the choosen reference frame. This semi-group can be intuitively interpreted as the time coordinate t [26]. Time in fact has an addition operation and an origin, the identity, like a group. The action of the semi-group on X is a set of maps from X to itself parametric in the time t, and this is intuitively the time evolution. [27]
Time can be generalized too as a generic set of continuous parameters, for example the control parameters of a robot can be a manifold.
Considering two control variables of a robotic arm which are typically angles and assuming complete rotations of 360 degrees the space of configurations will then be a torus
There is no need that time has a direction, that is smooth or even that it has whatsoever meaning similar to the intuition of time, in fact it can be generalized to even more general algebraic objects [33]
Time typically is considered often an external parameter as in classical and quantum mechanics, and this is typically called time domain representation, and it goes hand in hand with the Hamiltonian mechanics formulation. This is not necessarily always the case: general relativity for example is frame independent,[34] and gravity has an influence over time too, and in quantum electrodynamics the use of the Lagrangian mechanics formulation is more common[35] where time and space are on same footing. In both cases the literature still talks about dynamical systems.
Time can also be a discrete parameter. When time is generalized to the multi-dimensional case, i.e. as a general set of control or external parameters, this space can be interpreted as a Lattice, i.e. as the discrete points of a manifold or the tics of a stock price.[36] Discrete Time events therefore can be counted by integers, for example like the measurements of the position of the planets in the sky, but this can be very different than the intution of time as a clock that has equispaced time events. One of the tasks is typically to extract some mathematical model from the data.[37]
Not deterministic
The evolution rule of the dynamical system is a function that describes what future states follow from the current state. Often the function is deterministic, that is, for a given time interval only one future state follows from the current state.[38][39] However, some systems are not deterministic they may allow multiple future states (i.e. the maps are generalized into multivalued functions and not uniquely defined everywhere) and the system can be subject to a bifurcation.
Some systems are also stochastic, either in the input parameters such as an oscillator with a random force, or in the initial conditions, or in the predicted variables as in a Stochastic differential equation. In that random events also affect the evolution of the state variables, and this includes stochastic jump processes which are not continuos, a prototype example of a stochastic dynamical system are stock prices.[40]
Chaotic and Quantum systems
Last but not least there are chaotic systems (i.e typically deterministic but not predictable) such as:
Assume that X is a non empty Set with elements called States. Assume a general transformation:
It is possible to interpret X as a state space and T as the evolution between states.[49] Adding different structures on T and on X allows to model different properties of the dynamical system.
It is possible to model time evolution: can be a semigroup with one parameter called time that will also belong to a semi-group such as in the discrete time case, in the continuos time case.
A semigroup structure introduces associativity
which implies a composition law between different time evoloutions[50]:
It is possible to define an origin of time adding an identity to the semi-group
and it is finally possible also to model reversible time evolution: T can be a group such as or , and being a group this in fact has a definition of inverse transformations[51]:
In the geometrical definition, a dynamical system is the tuple . is the domain for time – there are many choices, usually the reals or the integers, possibly restricted to be non-negative. is a manifold, i.e. locally a Banach space or Euclidean space, or in the discrete case a graph. f is an evolution rule t→ft (with ) such that ft is a diffeomorphism of the manifold to itself. So, f is a "smooth" mapping of the time-domain into the space of diffeomorphisms of the manifold to itself. In other terms, f(t) is a diffeomorphism, for every time t in the domain .
Real dynamical system
A real dynamical system, real-time dynamical system, continuous time dynamical system, or flow is a tuple (T, M, Φ) with T an open interval in the real numbersR, M a manifold locally diffeomorphic to a Banach space, and Φ a continuous function. If Φ is continuously differentiable the system is called a differentiable dynamical system. If the manifold M is locally diffeomorphic to Rn, the dynamical system is finite-dimensional; if not, the dynamical system is infinite-dimensional. This does not assume a symplectic structure. When T is taken to be the reals, the dynamical system is called global or a flow; and if T is restricted to the non-negative reals, then the dynamical system is a semi-flow.
It is often useful to study the continuous extension Φ* of Φ to the one-point compactificationX* of X. Even after losing the differential structure of the original system, there are compactness arguments to analyze the new system (R, X*, Φ*). This is similar in spirit to Projective geometry where all limit points to infinity are the same point.
As an example in a topological dynamical system the limit orbit of an attractor is contained within the manifold itself. This is a non trivial statement for multiple reasons: limit orbits may never be reached; limit orbits may have Lebesgue measure zero; attaching a probability to a limit orbit would be non trivial; an attractor may also have multiple limit orbits and the distinction between different compactifications may be relevant.
A dynamical system may be defined formally as a measure-preserving transformation of a measure space, the triplet (T, (X, Σ, μ), Φ). Here, T is a monoid (usually the non-negative integers), X is a set, and (X, Σ, μ) is a probability space, meaning that Σ is a sigma-algebra on X and μ is a finite measure on (X, Σ). A map Φ: X → X is said to be Σ-measurable if and only if, for every σ in Σ, one has . A map Φ is said to preserve the measure if and only if, for every σ in Σ, one has . Combining the above, a map Φ is said to be a measure-preserving transformation of X, if it is a map from X to itself, it is Σ-measurable, and is measure-preserving. The triplet (T, (X, Σ, μ), Φ), for such a Φ, is then defined to be a dynamical system.
The map Φ embodies the time evolution of the dynamical system. Thus, for discrete dynamical systems the iterates for every integer n are studied [citation needed]. For continuous dynamical systems, the map Φ is understood to be a finite time evolution map and the construction is more complicated.[citation needed]
Relation to geometric definition
The measure theoretical definition assumes the existence of a measure-preserving transformation. Many different invariant measures can be associated to any one evolution rule. If the dynamical system is given by a system of differential equations the appropriate measure must be determined. This makes it difficult to develop ergodic theory starting from differential equations, so it becomes convenient to have a dynamical systems-motivated definition within ergodic theory that side-steps the choice of measure and assumes the choice has been made. A simple construction (sometimes called the Krylov–Bogolyubov theorem) shows that for a large class of systems it is always possible to construct a measure so as to make the evolution rule of the dynamical system a measure-preserving transformation. In the construction a given measure of the state space is summed for all future points of a trajectory, assuring the invariance.
Some systems have a natural measure, such as the Liouville measure in Hamiltonian systems, chosen over other invariant measures, such as the measures supported on periodic orbits of the Hamiltonian system. For chaotic dissipative systems the choice of invariant measure is technically more challenging. The measure needs to be supported on the attractor, but attractors have zero Lebesgue measure and the invariant measures must be singular with respect to the Lebesgue measure. A small region of phase space shrinks under time evolution.
For hyperbolic dynamical systems, the Sinai–Ruelle–Bowen measures appear to be the natural choice. They are constructed on the geometrical structure of stable and unstable manifolds of the dynamical system; they behave physically under small perturbations; and they explain many of the observed statistics of hyperbolic systems.
Definition with Category theory
Categories vs semi-groups
"A category X of mathematical objects has a semigroup G of homomorphisms acting on it (topological spaces have continuous maps, sets have arbitrary maps, groups, rings fields or algebras have homomorphisms, measure spaces have measurable maps). We can view each of these categories as a dynamical system. One can even include the category of dynamical systems with suitable homomorphisms. But this viewpoint is not a very useful in itself"[55]
Definition with monoids
In the context of category theory, categories are always defined together with an Identity map, therefore these definitions are based on monoids instead of semi-groups[56].
for and , where we have defined the set for any x in X.
In particular, in the case that we have for every x in X that and thus that Φ defines a monoid action of T on X.
The function Φ(t,x) is called the evolution function of the dynamical system: it associates to every point x in the set X a unique image, depending on the variable t, called the evolution parameter. X is called phase space or state space, while the variable x represents an initial state of the system.
We often write
if we take one of the variables as constant. The function
is called the flow through x and its graph is called the trajectory through x. The set
is called the orbit through x. The orbit through x is the image of the flow through x. A subset S of the state space X is called Φ-invariant if for all x in S and all t in T
Thus, in particular, if S is Φ-invariant, for all x in S. That is, the flow through x must be defined for all time for every element of S.
Construction of dynamical systems
The concept of evolution in time is central to the theory of dynamical systems as seen in the previous sections: the basic reason for this fact is that the starting motivation of the theory was the study of time behavior of classical mechanical systems. But a system of ordinary differential equations must be solved before it becomes a dynamic system. For example, consider an initial value problem such as the following:
v: T × M → TM is a vector field in Rn or Cn and represents the change of velocity induced by the known forces acting on the given material point in the phase space M. The change is not a vector in the phase spaceM, but is instead in the tangent spaceTM.
There is no need for higher order derivatives in the equation, nor for the parameter t in v(t,x), because these can be eliminated by considering systems of higher dimensions.
Depending on the properties of this vector field, the mechanical system is called
autonomous, when v(t, x) = v(x)
homogeneous when v(t, 0) = 0 for all t
The solution can be found using standard ODE techniques and is denoted as the evolution function already introduced above
The dynamical system is then (T, M, Φ).
Some formal manipulation of the system of differential equations shown above gives a more general form of equations a dynamical system must satisfy
where is a functional from the set of evolution functions to the field of the complex numbers.
This equation is useful when modeling mechanical systems with complicated constraints.
Many of the concepts in dynamical systems can be extended to infinite-dimensional manifolds—those that are locally Banach spaces—in which case the differential equations are partial differential equations.
Discrete dynamical systems
A Computational Fluid Dynamics mesh is an example of a discretization of a dynamical system, typically both in space and time, for computational purposes
A discrete dynamical system is when either time or space or both are discrete. Typically for both space and time, there is a finite or countable sets of points and bounded maps and operators, that can be manipulated on a computer given some general assumptions on the boundaries.
Math definition
In the general context of mathematics, it's possible to define the dynamical system as a general discrete map [59] as in the Formal definition. A generic sequence is already per se a discrete dynamical system[60]. Recursion and interation of maps is another such case[61]. A prototype of this is the Logistic map[62].
Empirical definition
From an empirical perspective, all dynamical systems derived from temporal data are discrete, Gauss for example proved that with the measurement of 3 positions and times of Ceres in the sky is possible to fully determine the orbit, therefore be able to compute any possible position and velocity of the asteroid in the past or the future and therefore fully characterize the dynamical system.[63] Typical tasks with experimental data are to derive a mathematical model.[64]
More generally this can be generalized into a generic discrete map from a n-dimensionalmanifold to itself:
In the context of Hamiltonianflows[69], motion itself can be considered a canonical transformation (i.e. ultimately a map) and therefore a discrete set of these in a discrete time interval is again a shape of characterization of the full discrete dynamical system.
An example of this is a weather forecast of Earth where the data points are separated in space from each other. The system can be put on a lattice, and formulas can be used to compute and predict certain variables, like in the case of the discretization of Navier–Stokes equations.
Discrete dynamical systems are often also called cascades, when the concept of passing over information from one step to the next is predominant. Typical examples are avalanches[71][72] and also period doubling cascades.[73] When T is taken to be the integers, it is a cascade or a map. If T is restricted to the non-negative integers the system is called a semi-cascade.[74][clarification needed]
A cellular automaton is a tuple (T, M, Φ), with T a lattice such as the integers or a higher-dimensional integer grid, M is a set of functions from an integer lattice (again, with one or more dimensions) to a finite set, and Φ a (locally defined) evolution function. As such cellular automata are dynamical systems. The lattice in M represents the "space" lattice, while the one in T represents the "time" lattice.[clarification needed]
Linear dynamical systems are at the heart of any system engineering and system theory curriculum. Historically linear systems up to the 1970s reflected most of system theory as a whole (i.e before the widespread availability of computers). They include the basic features of any dynamical system, such as attenuationsaturation and oscillation, and at least locally they can approximate also any non linear systems.
Linear dynamical systems can be solved in terms of simple functions such as exponentials and simple trigonometric functions (i.e complex exponentials), and the behavior of all orbits can be classified.
In a linear system the phase space is the N-dimensional Euclidean space, so any point in phase space can be represented by a vector with N numbers. N dimensional Linear dynamical systems are also not chaotic
The analysis of linear systems is also simplified and possible because they satisfy a superposition principle: if u(t) and w(t) satisfy a linear differential equation that describe a system, then so will a linear combination . With superposition is possible to generate new solutions from known ones, therefore is just necessary to classify the fundamental solutions to know all of them.
Flows
For a flow, the vector field v(x) is an affine function of the position in the phase space, that is,
with A a matrix, b a vector of numbers and x the position vector. The solution to this system can be found by using the superposition principle (linearity). The case b≠0 with A=0 is just a straight line in the direction ofb:
When b is zero and A≠0 the origin is an equilibrium (or singular) point of the flow, that is, if x0=0, then the orbit remains there. For other initial conditions, the equation of motion is given by the exponential of a matrix: for an initial point x0,
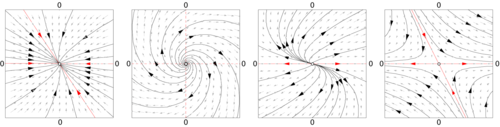
When b = 0, the eigenvalues of A determine the structure of the phase space. From the eigenvalues and the eigenvectors of A it is possible to determine if an initial point will converge or diverge to the equilibrium point at the origin.
The distance between two different initial conditions in the case A≠0 will change exponentially in most cases, either converging exponentially fast towards a point, or diverging exponentially fast. Linear systems display sensitive dependence on initial conditions in the case of divergence. For nonlinear systems this is one of the (necessary but not sufficient) conditions for chaotic behavior.
with A a matrix and b a vector. As in the continuous case, the change of coordinates x→x+(1−A)–1b removes the term b from the equation. In the new coordinate system, the origin is a fixed point of the map and the solutions are of the linear system Anx0. The solutions for the map are no longer curves, but points that hop in the phase space. The orbits are organized in curves, or fibers, which are collections of points that map into themselves under the action of the map.
As in the continuous case, the eigenvalues and eigenvectors of A determine the structure of phase space. For example, if u1 is an eigenvector of A, with a real eigenvalue smaller than one, then the straight lines given by the points along αu1, with α∈R, is an invariant curve of the map. Points in this straight line run into the fixed point.
The qualitative properties of dynamical systems do not change under a smooth change of coordinates (this is sometimes taken as a definition of qualitative): a singular point of the vector field (a point wherev(x)=0) will remain a singular point under smooth transformations; a periodic orbit is a loop in phase space and smooth deformations of the phase space cannot alter it being a loop. It is in the neighborhood of singular points and periodic orbits that the structure of a phase space of a dynamical system can be well understood. In the qualitative study of dynamical systems, the approach is to show that there is a change of coordinates (usually unspecified, but computable) that makes the dynamical system as simple as possible.
Rectification
A flow in most small patches of the phase space can be made very simple. If y is a point where the vector field v(y)≠0, then there is a change of coordinates for a region around y where the vector field becomes a series of parallel vectors of the same magnitude. This is known as the rectification theorem.
The rectification theorem says that away from singular points the dynamics of a point in a small patch is a straight line. The patch can sometimes be enlarged by stitching several patches together, and when this works out in the whole phase space M the dynamical system is integrable. In most cases the patch cannot be extended to the entire phase space. There may be singular points in the vector field (where v(x)=0); or the patches may become smaller and smaller as some point is approached. The more subtle reason is a global constraint, where the trajectory starts out in a patch, and after visiting a series of other patches comes back to the original one. If the next time the orbit loops around phase space in a different way, then it is impossible to rectify the vector field in the whole series of patches.
Near periodic orbits
In general, in the neighborhood of a periodic orbit the rectification theorem cannot be used. Poincaré developed an approach that transforms the analysis near a periodic orbit to the analysis of a map. Pick a point x0 in the orbit γ and consider the points in phase space in that neighborhood that are perpendicular to v(x0). These points are a Poincaré sectionS(γ,x0), of the orbit. The flow now defines a map, the Poincaré mapF:S→S, for points starting in S and returning toS. Not all these points will take the same amount of time to come back, but the times will be close to the time it takesx0.
The intersection of the periodic orbit with the Poincaré section is a fixed point of the Poincaré map F. By a translation, the point can be assumed to be at x=0. The Taylor series of the map is F(x)=J·x+O(x2), so a change of coordinates h can only be expected to simplify F to its linear part
This is known as the conjugation equation. Finding conditions for this equation to hold has been one of the major tasks of research in dynamical systems. Poincaré first approached it assuming all functions to be analytic and in the process discovered the non-resonant condition. If λ1,...,λν are the eigenvalues of J they will be resonant if one eigenvalue is an integer linear combination of two or more of the others. As terms of the form λi – Σ (multiples of other eigenvalues) occurs in the denominator of the terms for the function h, the non-resonant condition is also known as the small divisor problem.
Conjugation results
The results on the existence of a solution to the conjugation equation depend on the eigenvalues of J and the degree of smoothness required from h. As J does not need to have any special symmetries, its eigenvalues will typically be complex numbers. When the eigenvalues of J are not in the unit circle, the dynamics near the fixed point x0 of F is called hyperbolic and when the eigenvalues are on the unit circle and complex, the dynamics is called elliptic.
In the hyperbolic case, the Hartman–Grobman theorem gives the conditions for the existence of a continuous function that maps the neighborhood of the fixed point of the map to the linear map J·x. The hyperbolic case is also structurally stable. Small changes in the vector field will only produce small changes in the Poincaré map and these small changes will reflect in small changes in the position of the eigenvalues of J in the complex plane, implying that the map is still hyperbolic.
bifurcation with saddle point and equilibrium point
When the evolution map Φt (or the vector field it is derived from) depends on a parameter μ, the structure of the phase space will also depend on this parameter. Small changes may produce no qualitative changes in the phase space until a special value μ0 is reached. At this point the phase space changes qualitatively and the dynamical system is said to have gone through a bifurcation.
Bifurcation theory considers a structure in phase space (typically a fixed point, a periodic orbit, or an invariant torus) and studies its behavior as a function of the parameterμ. At the bifurcation point the structure may change its stability, split into new structures, or merge with other structures. By using Taylor series approximations of the maps and an understanding of the differences that may be eliminated by a change of coordinates, it is possible to catalog the bifurcations of dynamical systems.
The bifurcations of a hyperbolic fixed point x0 of a system family Fμ can be characterized by the eigenvalues of the first derivative of the system DFμ(x0) computed at the bifurcation point. For a map, the bifurcation will occur when there are eigenvalues of DFμ on the unit circle. For a flow, it will occur when there are eigenvalues on the imaginary axis. For more information, see the main article on Bifurcation theory.
In many dynamical systems, it is possible to choose the coordinates of the system so that the volume (really a ν-dimensional volume) in phase space is invariant. This happens for mechanical systems derived from Newton's laws as long as the coordinates are the position and the momentum and the volume is measured in units of (position)×(momentum). The flow takes points of a subset A into the points Φt(A) and invariance of the phase space means that
In the Hamiltonian formalism, given a coordinate it is possible to derive the appropriate (generalized) momentum such that the associated volume is preserved by the flow. The volume is said to be computed by the Liouville measure.
In a Hamiltonian system, not all possible configurations of position and momentum can be reached from an initial condition. Because of energy conservation, only the states with the same energy as the initial condition are accessible. The states with the same energy form an energy shell Ω, a sub-manifold of the phase space. The volume of the energy shell, computed using the Liouville measure, is preserved under evolution.
For systems where the volume is preserved by the flow, Poincaré discovered the recurrence theorem: Assume the phase space has a finite Liouville volume and let F be a phase space volume-preserving map and A a subset of the phase space. Then almost every point of A returns to A infinitely often. The Poincaré recurrence theorem was used by Zermelo to object to Boltzmann's derivation of the increase in entropy in a dynamical system of colliding atoms.
One of the questions raised by Boltzmann's work was the possible equality between time averages and space averages, what he called the ergodic hypothesis. The hypothesis states that the length of time a typical trajectory spends in a region A is vol(A)/vol(Ω).
The ergodic hypothesis turned out not to be the essential property needed for the development of statistical mechanics and a series of other ergodic-like properties were introduced to capture the relevant aspects of physical systems. Koopman approached the study of ergodic systems by the use of functional analysis. An observable a is a function that to each point of the phase space associates a number (say instantaneous pressure, or average height). The value of an observable can be computed at another time by using the evolution function φt. This introduces an operator Ut, the transfer operator,
By studying the spectral properties of the linear operator U it becomes possible to classify the ergodic properties ofΦt. In using the Koopman approach of considering the action of the flow on an observable function, the finite-dimensional nonlinear problem involving Φt gets mapped into an infinite-dimensional linear problem involvingU.
The Liouville measure restricted to the energy surface Ω is the basis for the averages computed in equilibrium statistical mechanics. An average in time along a trajectory is equivalent to an average in space computed with the Boltzmann factor exp(−βH). This idea has been generalized by Sinai, Bowen, and Ruelle (SRB) to a larger class of dynamical systems that includes dissipative systems. SRB measures replace the Boltzmann factor and they are defined on attractors of chaotic systems.
Simple nonlinear dynamical systems, including piecewise linear systems, can exhibit strongly unpredictable behavior, which might seem to be random, despite the fact that they are fundamentally deterministic. This unpredictable behavior has been called chaos. Hyperbolic systems are precisely defined dynamical systems that exhibit the properties ascribed to chaotic systems. In hyperbolic systems the tangent spaces perpendicular to an orbit can be decomposed into a combination of two parts: one with the points that converge towards the orbit (the stable manifold) and another of the points that diverge from the orbit (the unstable manifold).
This branch of mathematics deals with the long-term qualitative behavior of dynamical systems. Here, the focus is not on finding precise solutions to the equations defining the dynamical system (which is often hopeless), but rather to answer questions like "Will the system settle down to a steady state in the long term, and if so, what are the possible attractors?" or "Does the long-term behavior of the system depend on its initial condition?"
The chaotic behavior of complex systems is not the issue. Meteorology has been known for years to involve complex—even chaotic—behavior. Chaos theory has been so surprising because chaos can be found within almost trivial systems. The Pomeau–Manneville scenario of the logistic map and the Fermi–Pasta–Ulam–Tsingou problem arose with just second-degree polynomials; the horseshoe map is piecewise linear.
Solutions of finite duration
For non-linear autonomous ODEs it is possible under some conditions to develop solutions of finite duration,[75] meaning here that in these solutions the system will reach the value zero at some time, called an ending time, and then stay there forever after. This can occur only when system trajectories are not uniquely determined forwards and backwards in time by the dynamics, thus solutions of finite duration imply a form of "backwards-in-time unpredictability" closely related to the forwards-in-time unpredictability of chaos. This behavior cannot happen for Lipschitz continuous differential equations according to the proof of the Picard-Lindelof theorem. These solutions are non-Lipschitz functions at their ending times and cannot be analytical functions on the whole real line.
As example, the equation:
Admits the finite duration solution:
that is zero for and is not Lipschitz continuous at its ending time
In the period between 2000 and 2020 category theory has been applied to system theory(e.g to open systems and subsystems)[76] and to dynamical systems[77][78][79], the motivation is to study common properties across Dynamical systems, Topological dynamical systems (i.e. with compact state space), and measure preserving dynamical systems (e.g hamiltonian systems)[80] It is also possible to draw an analogy between group representation theory (such as irreducible representations) and ergodic decomposition[81] i.e. that every invariant (i.e conservative) measure is a mixture of ergodic ones, in an analogous fashion to the central limit theorem. Ultimately this can be compared to the fundamental theorem of arithmetic and to prime number decomposition[82].
↑Melby, Paul; Weber, Nicholas; Hübler, Alfred (September 2005). "Dynamics of self-adjusting systems with noise". Chaos: An Interdisciplinary Journal of Nonlinear Science. 15 (3) 033902. Bibcode:2005Chaos..15c3902M. doi:10.1063/1.1953147. PMID16252993.
↑One of the first to get the intuition of numerical computations for weather forecasting is Richardson, he imagined a set of human people doing computations
↑Schultz, David M.; Lynch, Peter (April 2022). "100 Years of L. F. Richardson's Weather Prediction by Numerical Process". Monthly Weather Review. 150 (4): 693–695. doi:10.1175/MWR-D-22-0068.1.
↑Rega, Giuseppe (2020). "Tribute to Ali H. Nayfeh (1933–2017)". IUTAM Symposium on Exploiting Nonlinear Dynamics for Engineering Systems. IUTAM Bookseries. Vol.37. pp.1–13. doi:10.1007/978-3-030-23692-2_1. ISBN978-3-030-23691-5.
↑Doikou, Anastasia; Evangelisti, Stefano; Feverati, Giovanni; Karaiskos, Nikos (10 July 2010). "Introduction to Quantum Integrability". International Journal of Modern Physics A. 25 (17): 3307–3351. arXiv:0912.3350. doi:10.1142/S0217751X10049803.
↑Sip, Viktor; Breyton, Martin; Petkoski, Spase; Jirsa, Viktor (2025). "Dynamical system reconstruction from partial observations using stochastic dynamics". arXiv:2510.01089 [cs.LG].
↑A graph and a general discrete space can be a Hausdorff space, can have a measure, and at least if it is finite is compact. It's not strictly a good example of a Banach space because Cauchy sequences may not make sense. This boundary between finite and infinite is interesting in the field of arithmetic geometry.
↑Moore, Samuel A.; Mann, Brian P.; Chen, Boyuan (17 December 2025). "Automated global analysis of experimental dynamics through low-dimensional linear embeddings". npj Complexity. 2 (1) 36. doi:10.1038/s44260-025-00062-y.
↑Vardia T. Haimo (1985). "Finite Time Differential Equations". 1985 24th IEEE Conference on Decision and Control. pp.1729–1733. doi:10.1109/CDC.1985.268832.
Encyclopaedia of Mathematical Sciences ( ISSN0938-0396) has a sub-series on dynamical systems with reviews of current research.
Christian Bonatti; Lorenzo J. Díaz; Marcelo Viana (2005). Dynamics Beyond Uniform Hyperbolicity: A Global Geometric and Probabilistic Perspective. Springer. ISBN978-3-540-22066-4.
Tim Bedford, Michael Keane and Caroline Series, eds. (1991). Ergodic theory, symbolic dynamics and hyperbolic spaces. Oxford University Press. ISBN978-0-19-853390-0.{{cite book}}: CS1 maint: multiple names: authors list (link)
David D. Nolte (2015). Introduction to Modern Dynamics: Chaos, Networks, Space and Time. Oxford University Press. ISBN978-0199657032.
Julien Clinton Sprott (2003). Chaos and time-series analysis. Oxford University Press. ISBN978-0-19-850839-7.
Steven H. Strogatz (1994). Nonlinear dynamics and chaos: with applications to physics, biology chemistry and engineering. Addison Wesley. ISBN978-0-201-54344-5.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.