Iterated functions
Given a mapping f from a set X into itself,

a point x in X is called periodic point if there exists an n so that

where fn is the nth iterate of f. The smallest positive integer n satisfying the above is called the prime period or least period of the point x. If every point in X is a periodic point with the same period n, then f is called periodic with period n (this is not to be confused with the notion of a periodic function).
If there exist distinct n and m such that

then x is called a preperiodic point. All periodic points are preperiodic.
If f is a diffeomorphism of a differentiable manifold, so that the derivative  is defined, then one says that a periodic point is hyperbolic if
is defined, then one says that a periodic point is hyperbolic if

that it is attractive if

and it is repelling if

If the dimension of the stable manifold of a periodic point or fixed point is zero, the point is called a source; if the dimension of its unstable manifold is zero, it is called a sink; and if both the stable and unstable manifold have nonzero dimension, it is called a saddle or saddle point.
Examples
A period-one point is called a fixed point.
The logistic map

exhibits periodicity for various values of the parameter r. For r between 0 and 1, 0 is the sole periodic point, with period 1 (giving the sequence 0, 0, 0, …, which attracts all orbits). For r between 1 and 3, the value 0 is still periodic but is not attracting, while the value  is an attracting periodic point of period 1. With r greater than 3 but less than
is an attracting periodic point of period 1. With r greater than 3 but less than  there are a pair of period-2 points which together form an attracting sequence, as well as the non-attracting period-1 points 0 and
there are a pair of period-2 points which together form an attracting sequence, as well as the non-attracting period-1 points 0 and  As the value of parameter r rises toward 4, there arise groups of periodic points with any positive integer for the period; for some values of r one of these repeating sequences is attracting while for others none of them are (with almost all orbits being chaotic).
As the value of parameter r rises toward 4, there arise groups of periodic points with any positive integer for the period; for some values of r one of these repeating sequences is attracting while for others none of them are (with almost all orbits being chaotic).
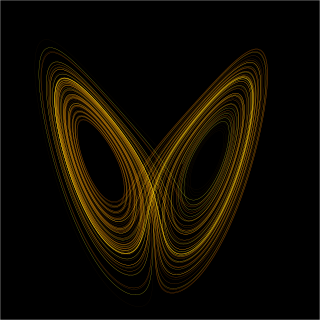
In mathematics, a dynamical system is a system in which a function describes the time dependence of a point in an ambient space, such as in a parametric curve. Examples include the mathematical models that describe the swinging of a clock pendulum, the flow of water in a pipe, the random motion of particles in the air, and the number of fish each springtime in a lake. The most general definition unifies several concepts in mathematics such as ordinary differential equations and ergodic theory by allowing different choices of the space and how time is measured. Time can be measured by integers, by real or complex numbers or can be a more general algebraic object, losing the memory of its physical origin, and the space may be a manifold or simply a set, without the need of a smooth space-time structure defined on it.
In mathematics, the tangent space of a manifold generalizes to higher dimensions the notion of tangent planes to surfaces in three-dimensional space and tangent lines to curves in two-dimensional space. In the context of physics the tangent space to a manifold at a point can be viewed as the space of possible velocities for a particle moving on the manifold.
Distributions, also known as Schwartz distributions or generalized functions, are objects that generalize the classical notion of functions in mathematical analysis. Distributions make it possible to differentiate functions whose derivatives do not exist in the classical sense. In particular, any locally integrable function has a distributional derivative.
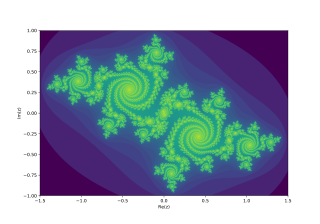
In the context of complex dynamics, a branch of mathematics, the Julia set and the Fatou set are two complementary sets defined from a function. Informally, the Fatou set of the function consists of values with the property that all nearby values behave similarly under repeated iteration of the function, and the Julia set consists of values such that an arbitrarily small perturbation can cause drastic changes in the sequence of iterated function values. Thus the behavior of the function on the Fatou set is "regular", while on the Julia set its behavior is "chaotic".
In mathematics, Sharkovskii's theorem, named after Oleksandr Mykolayovych Sharkovsky, who published it in 1964, is a result about discrete dynamical systems. One of the implications of the theorem is that if a discrete dynamical system on the real line has a periodic point of period 3, then it must have periodic points of every other period.
In mathematics, specifically in the study of dynamical systems, an orbit is a collection of points related by the evolution function of the dynamical system. It can be understood as the subset of phase space covered by the trajectory of the dynamical system under a particular set of initial conditions, as the system evolves. As a phase space trajectory is uniquely determined for any given set of phase space coordinates, it is not possible for different orbits to intersect in phase space, therefore the set of all orbits of a dynamical system is a partition of the phase space. Understanding the properties of orbits by using topological methods is one of the objectives of the modern theory of dynamical systems.
In mathematics, the symmetry of second derivatives refers to the possibility of interchanging the order of taking partial derivatives of a function
In mathematics, specifically the study of differential equations, the Picard–Lindelöf theorem gives a set of conditions under which an initial value problem has a unique solution. It is also known as Picard's existence theorem, the Cauchy–Lipschitz theorem, or the existence and uniqueness theorem.
In mathematics, the total variation identifies several slightly different concepts, related to the (local or global) structure of the codomain of a function or a measure. For a real-valued continuous function f, defined on an interval [a, b] ⊂ R, its total variation on the interval of definition is a measure of the one-dimensional arclength of the curve with parametric equation x ↦ f(x), for x ∈ [a, b]. Functions whose total variation is finite are called functions of bounded variation.

The dyadic transformation is the mapping

In mathematics, a differentiable manifold is a type of manifold that is locally similar enough to a vector space to allow one to apply calculus. Any manifold can be described by a collection of charts (atlas). One may then apply ideas from calculus while working within the individual charts, since each chart lies within a vector space to which the usual rules of calculus apply. If the charts are suitably compatible, then computations done in one chart are valid in any other differentiable chart.

In mathematics, a flow formalizes the idea of the motion of particles in a fluid. Flows are ubiquitous in science, including engineering and physics. The notion of flow is basic to the study of ordinary differential equations. Informally, a flow may be viewed as a continuous motion of points over time. More formally, a flow is a group action of the real numbers on a set.
In mathematics, subharmonic and superharmonic functions are important classes of functions used extensively in partial differential equations, complex analysis and potential theory.
In mathematics, more specifically in dynamical systems, the method of averaging exploits systems containing time-scales separation: a fast oscillationversus a slow drift. It suggests that we perform an averaging over a given amount of time in order to iron out the fast oscillations and observe the qualitative behavior from the resulting dynamics. The approximated solution holds under finite time inversely proportional to the parameter denoting the slow time scale. It turns out to be a customary problem where there exists the trade off between how good is the approximated solution balanced by how much time it holds to be close to the original solution.

In the study of dynamical systems, a homoclinic orbit is a path through phase space which joins a saddle equilibrium point to itself. More precisely, a homoclinic orbit lies in the intersection of the stable manifold and the unstable manifold of an equilibrium. It is a heteroclinic orbit–a path between any two equilibrium points–in which the endpoints are one and the same.

In mathematics, in the phase portrait of a dynamical system, a heteroclinic orbit is a path in phase space which joins two different equilibrium points. If the equilibrium points at the start and end of the orbit are the same, the orbit is a homoclinic orbit.
In mathematics, especially in the study of dynamical systems, a limit set is the state a dynamical system reaches after an infinite amount of time has passed, by either going forward or backwards in time. Limit sets are important because they can be used to understand the long term behavior of a dynamical system. A system that has reached its limiting set is said to be at equilibrium.
Numerical continuation is a method of computing approximate solutions of a system of parameterized nonlinear equations,
In mathematics, the Pettis integral or Gelfand–Pettis integral, named after Israel M. Gelfand and Billy James Pettis, extends the definition of the Lebesgue integral to vector-valued functions on a measure space, by exploiting duality. The integral was introduced by Gelfand for the case when the measure space is an interval with Lebesgue measure. The integral is also called the weak integral in contrast to the Bochner integral, which is the strong integral.
In geometry, a valuation is a finitely additive function on a collection of admissible subsets of a fixed set with values in an abelian semigroup. For example, the Lebesgue measure is a valuation on finite unions of convex bodies of Euclidean space Other examples of valuations on finite unions of convex bodies are the surface area, the mean width, and the Euler characteristic.




