
For statistics and control theory, Kalman filtering, also known as linear quadratic estimation (LQE), is an algorithm that uses a series of measurements observed over time, including statistical noise and other inaccuracies, and produces estimates of unknown variables that tend to be more accurate than those based on a single measurement alone, by estimating a joint probability distribution over the variables for each timeframe. The filter is named after Rudolf E. Kálmán, who was one of the primary developers of its theory.

Synthetic-aperture radar (SAR) is a form of radar that is used to create two-dimensional images or three-dimensional reconstructions of objects, such as landscapes. SAR uses the motion of the radar antenna over a target region to provide finer spatial resolution than conventional stationary beam-scanning radars. SAR is typically mounted on a moving platform, such as an aircraft or spacecraft, and has its origins in an advanced form of side looking airborne radar (SLAR). The distance the SAR device travels over a target during the period when the target scene is illuminated creates the large synthetic antenna aperture. Typically, the larger the aperture, the higher the image resolution will be, regardless of whether the aperture is physical or synthetic – this allows SAR to create high-resolution images with comparatively small physical antennas. For a fixed antenna size and orientation, objects which are further away remain illuminated longer - therefore SAR has the property of creating larger synthetic apertures for more distant objects, which results in a consistent spatial resolution over a range of viewing distances.

Simultaneous localization and mapping (SLAM) is the computational problem of constructing or updating a map of an unknown environment while simultaneously keeping track of an agent's location within it. While this initially appears to be a chicken or the egg problem, there are several algorithms known to solve it in, at least approximately, tractable time for certain environments. Popular approximate solution methods include the particle filter, extended Kalman filter, covariance intersection, and GraphSLAM. SLAM algorithms are based on concepts in computational geometry and computer vision, and are used in robot navigation, robotic mapping and odometry for virtual reality or augmented reality.

A sensor array is a group of sensors, usually deployed in a certain geometry pattern, used for collecting and processing electromagnetic or acoustic signals. The advantage of using a sensor array over using a single sensor lies in the fact that an array adds new dimensions to the observation, helping to estimate more parameters and improve the estimation performance. For example an array of radio antenna elements used for beamforming can increase antenna gain in the direction of the signal while decreasing the gain in other directions, i.e., increasing signal-to-noise ratio (SNR) by amplifying the signal coherently. Another example of sensor array application is to estimate the direction of arrival of impinging electromagnetic waves. The related processing method is called array signal processing. A third examples includes chemical sensor arrays, which utilize multiple chemical sensors for fingerprint detection in complex mixtures or sensing environments. Application examples of array signal processing include radar/sonar, wireless communications, seismology, machine condition monitoring, astronomical observations fault diagnosis, etc.

Sensor fusion is the process of combining sensor data or data derived from disparate sources such that the resulting information has less uncertainty than would be possible when these sources were used individually. For instance, one could potentially obtain a more accurate location estimate of an indoor object by combining multiple data sources such as video cameras and WiFi localization signals. The term uncertainty reduction in this case can mean more accurate, more complete, or more dependable, or refer to the result of an emerging view, such as stereoscopic vision.
The fast Kalman filter (FKF), devised by Antti Lange (born 1941), is an extension of the Helmert–Wolf blocking (HWB) method from geodesy to safety-critical real-time applications of Kalman filtering (KF) such as GNSS navigation up to the centimeter-level of accuracy and satellite imaging of the Earth including atmospheric tomography.
Recursive least squares (RLS) is an adaptive filter algorithm that recursively finds the coefficients that minimize a weighted linear least squares cost function relating to the input signals. This approach is in contrast to other algorithms such as the least mean squares (LMS) that aim to reduce the mean square error. In the derivation of the RLS, the input signals are considered deterministic, while for the LMS and similar algorithms they are considered stochastic. Compared to most of its competitors, the RLS exhibits extremely fast convergence. However, this benefit comes at the cost of high computational complexity.
In statistics, generalized least squares (GLS) is a method used to estimate the unknown parameters in a linear regression model when there is a certain degree of correlation between the residuals in the regression model. Least squares and weighted least squares may need to be more statistically efficient and prevent misleading inferences. GLS was first described by Alexander Aitken in 1935.
A radar tracker is a component of a radar system, or an associated command and control (C2) system, that associates consecutive radar observations of the same target into tracks. It is particularly useful when the radar system is reporting data from several different targets or when it is necessary to combine the data from several different radars or other sensors.
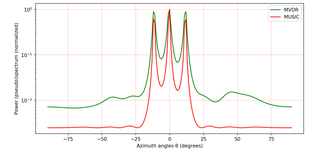
MUSIC is an algorithm used for frequency estimation and radio direction finding.
The image fusion process is defined as gathering all the important information from multiple images, and their inclusion into fewer images, usually a single one. This single image is more informative and accurate than any single source image, and it consists of all the necessary information. The purpose of image fusion is not only to reduce the amount of data but also to construct images that are more appropriate and understandable for the human and machine perception. In computer vision, multisensor image fusion is the process of combining relevant information from two or more images into a single image. The resulting image will be more informative than any of the input images.
In statistics, confirmatory factor analysis (CFA) is a special form of factor analysis, most commonly used in social science research. It is used to test whether measures of a construct are consistent with a researcher's understanding of the nature of that construct. As such, the objective of confirmatory factor analysis is to test whether the data fit a hypothesized measurement model. This hypothesized model is based on theory and/or previous analytic research. CFA was first developed by Jöreskog (1969) and has built upon and replaced older methods of analyzing construct validity such as the MTMM Matrix as described in Campbell & Fiske (1959).
GPS/INS is the use of GPS satellite signals to correct or calibrate a solution from an inertial navigation system (INS). The method is applicable for any GNSS/INS system.
An alpha beta filter is a simplified form of observer for estimation, data smoothing and control applications. It is closely related to Kalman filters and to linear state observers used in control theory. Its principal advantage is that it does not require a detailed system model.
In estimation theory, the extended Kalman filter (EKF) is the nonlinear version of the Kalman filter which linearizes about an estimate of the current mean and covariance. In the case of well defined transition models, the EKF has been considered the de facto standard in the theory of nonlinear state estimation, navigation systems and GPS.
The unscented transform (UT) is a mathematical function used to estimate the result of applying a given nonlinear transformation to a probability distribution that is characterized only in terms of a finite set of statistics. The most common use of the unscented transform is in the nonlinear projection of mean and covariance estimates in the context of nonlinear extensions of the Kalman filter. Its creator Jeffrey Uhlmann explained that "unscented" was an arbitrary name that he adopted to avoid it being referred to as the “Uhlmann filter” though others have indicated that "unscented" is a contrast to "scented" intended as a euphemism for "stinky"
Jeffrey K. Uhlmann is an American research scientist who is probably best known for his mathematical generalizations of the Kalman filter. Most of his publications and patents have been in the field of data fusion. He is also known for being a cult filmmaker and former recording artist.
Generalized filtering is a generic Bayesian filtering scheme for nonlinear state-space models. It is based on a variational principle of least action, formulated in generalized coordinates of motion. Note that "generalized coordinates of motion" are related to—but distinct from—generalized coordinates as used in (multibody) dynamical systems analysis. Generalized filtering furnishes posterior densities over hidden states generating observed data using a generalized gradient descent on variational free energy, under the Laplace assumption. Unlike classical filtering, generalized filtering eschews Markovian assumptions about random fluctuations. Furthermore, it operates online, assimilating data to approximate the posterior density over unknown quantities, without the need for a backward pass. Special cases include variational filtering, dynamic expectation maximization and generalized predictive coding.
In image Noise reduction, local pixel grouping is the algorithm to remove noise from images using principal component analysis (PCA).
The multi-fractional order estimator (MFOE) is a straightforward, practical, and flexible alternative to the Kalman filter (KF) for tracking targets. The MFOE is focused strictly on simple and pragmatic fundamentals along with the integrity of mathematical modeling. Like the KF, the MFOE is based on the least squares method (LSM) invented by Gauss and the orthogonality principle at the center of Kalman's derivation. Optimized, the MFOE yields better accuracy than the KF and subsequent algorithms such as the extended KF and the interacting multiple model (IMM). The MFOE is an expanded form of the LSM, which effectively includes the KF and ordinary least squares (OLS) as subsets. OLS is revolutionized in for application in econometrics. The MFOE also intersects with signal processing, estimation theory, economics, finance, statistics, and the method of moments. The MFOE offers two major advances: (1) minimizing the mean squared error (MSE) with fractions of estimated coefficients and (2) describing the effect of deterministic OLS processing of statistical inputs





