
In mathematics, specifically general topology, compactness is a property that seeks to generalize the notion of a closed and bounded subset of Euclidean space. The idea is that a compact space has no "punctures" or "missing endpoints", i.e., it includes all limiting values of points. For example, the open interval (0,1) would not be compact because it excludes the limiting values of 0 and 1, whereas the closed interval [0,1] would be compact. Similarly, the space of rational numbers is not compact, because it has infinitely many "punctures" corresponding to the irrational numbers, and the space of real numbers is not compact either, because it excludes the two limiting values and . However, the extended real number linewould be compact, since it contains both infinities. There are many ways to make this heuristic notion precise. These ways usually agree in a metric space, but may not be equivalent in other topological spaces.
In mathematics, the Cantor set is a set of points lying on a single line segment that has a number of unintuitive properties. It was discovered in 1874 by Henry John Stephen Smith and mentioned by German mathematician Georg Cantor in 1883.

In topology and related branches of mathematics, a connected space is a topological space that cannot be represented as the union of two or more disjoint non-empty open subsets. Connectedness is one of the principal topological properties that are used to distinguish topological spaces.

In mathematics and more specifically in topology, a homeomorphism, also called topological isomorphism, or bicontinuous function, is a bijective and continuous function between topological spaces that has a continuous inverse function. Homeomorphisms are the isomorphisms in the category of topological spaces—that is, they are the mappings that preserve all the topological properties of a given space. Two spaces with a homeomorphism between them are called homeomorphic, and from a topological viewpoint they are the same.
In mathematics, a topological space is, roughly speaking, a geometrical space in which closeness is defined but cannot necessarily be measured by a numeric distance. More specifically, a topological space is a set whose elements are called points, along with an additional structure called a topology, which can be defined as a set of neighbourhoods for each point that satisfy some axioms formalizing the concept of closeness. There are several equivalent definitions of a topology, the most commonly used of which is the definition through open sets, which is easier than the others to manipulate.
This is a glossary of some terms used in the branch of mathematics known as topology. Although there is no absolute distinction between different areas of topology, the focus here is on general topology. The following definitions are also fundamental to algebraic topology, differential topology and geometric topology. For a list of terms specific to algebraic topology, see Glossary of algebraic topology.

In mathematics, topological groups are the combination of groups and topological spaces, i.e. they are groups and topological spaces at the same time, such that the continuity condition for the group operations connects these two structures together and consequently they are not independent from each other.
In mathematics, a real interval is the set of all real numbers lying between two fixed endpoints with no "gaps". Each endpoint is either a real number or positive or negative infinity, indicating the interval extends without a bound. A real interval can contain neither endpoint, either endpoint, or both endpoints, excluding any endpoint which is infinite.
In the mathematical field of topology, the Alexandroff extension is a way to extend a noncompact topological space by adjoining a single point in such a way that the resulting space is compact. It is named after the Russian mathematician Pavel Alexandroff. More precisely, let X be a topological space. Then the Alexandroff extension of X is a certain compact space X* together with an open embedding c : X → X* such that the complement of X in X* consists of a single point, typically denoted ∞. The map c is a Hausdorff compactification if and only if X is a locally compact, noncompact Hausdorff space. For such spaces the Alexandroff extension is called the one-point compactification or Alexandroff compactification. The advantages of the Alexandroff compactification lie in its simple, often geometrically meaningful structure and the fact that it is in a precise sense minimal among all compactifications; the disadvantage lies in the fact that it only gives a Hausdorff compactification on the class of locally compact, noncompact Hausdorff spaces, unlike the Stone–Čech compactification which exists for any topological space.
In topology and related areas of mathematics, the quotient space of a topological space under a given equivalence relation is a new topological space constructed by endowing the quotient set of the original topological space with the quotient topology, that is, with the finest topology that makes continuous the canonical projection map. In other words, a subset of a quotient space is open if and only if its preimage under the canonical projection map is open in the original topological space.

In algebraic geometry and commutative algebra, the Zariski topology is a topology defined on geometric objects called varieties. It is very different from topologies that are commonly used in real or complex analysis; in particular, it is not Hausdorff. This topology was introduced primarily by Oscar Zariski and later generalized for making the set of prime ideals of a commutative ring a topological space.
In topology, the long line is a topological space somewhat similar to the real line, but in a certain sense "longer". It behaves locally just like the real line, but has different large-scale properties. Therefore, it serves as an important counterexample in topology. Intuitively, the usual real-number line consists of a countable number of line segments laid end-to-end, whereas the long line is constructed from an uncountable number of such segments.
In mathematical analysis, a space-filling curve is a curve whose range reaches every point in a higher dimensional region, typically the unit square. Because Giuseppe Peano (1858–1932) was the first to discover one, space-filling curves in the 2-dimensional plane are sometimes called Peano curves, but that phrase also refers to the Peano curve, the specific example of a space-filling curve found by Peano.
In mathematics, and specifically in topology, a CW complex is a topological space that is built by gluing together topological balls of different dimensions in specific ways. It generalizes both manifolds and simplicial complexes and has particular significance for algebraic topology. It was initially introduced by J. H. C. Whitehead to meet the needs of homotopy theory. CW complexes have better categorical properties than simplicial complexes, but still retain a combinatorial nature that allows for computation.
In mathematics, real trees are a class of metric spaces generalising simplicial trees. They arise naturally in many mathematical contexts, in particular geometric group theory and probability theory. They are also the simplest examples of Gromov hyperbolic spaces.

In mathematics, cobordism is a fundamental equivalence relation on the class of compact manifolds of the same dimension, set up using the concept of the boundary of a manifold. Two manifolds of the same dimension are cobordant if their disjoint union is the boundary of a compact manifold one dimension higher.

In topology, especially algebraic topology, the coneof a topological space is intuitively obtained by stretching X into a cylinder and then collapsing one of its end faces to a point. The cone of X is denoted by or by .
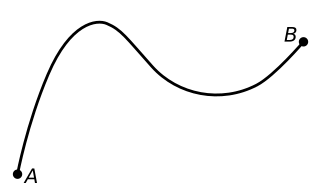
In mathematics, a path in a topological space is a continuous function from a closed interval into

In mathematics, a manifold is a topological space that locally resembles Euclidean space near each point. More precisely, an -dimensional manifold, or -manifold for short, is a topological space with the property that each point has a neighborhood that is homeomorphic to an open subset of -dimensional Euclidean space.
In the mathematical field of topology, a hyperconnected space or irreducible space is a topological space X that cannot be written as the union of two proper closed subsets. The name irreducible space is preferred in algebraic geometry.







