There are a lot of ways to study this kind of instability. One of them is to use the method of incremental deformations based on superposing a small perturbation on an equilibrium solution.
Single degree of freedom-systems
Consider as a simple example a rigid beam of length L, hinged in one end and free in the other, and having an angular spring attached to the hinged end. The beam is loaded in the free end by a force F acting in the compressive axial direction of the beam, see the figure to the right.
Moment equilibrium condition
Assuming a clockwise angular deflection , the clockwise moment exerted by the force becomes . The moment equilibrium equation is given by
where is the spring constant of the angular spring (Nm/radian). Assuming is small enough, implementing the Taylor expansion of the sine function and keeping the two first terms yields
which has three solutions, the trivial , and
which is imaginary (i.e. not physical) for and real otherwise. This implies that for small compressive forces, the only equilibrium state is given by , while if the force exceeds the value there is suddenly another mode of deformation possible.
Energy method
The same result can be obtained by considering energy relations. The energy stored in the angular spring is
and the work done by the force is simply the force multiplied by the vertical displacement of the beam end, which is . Thus,
The energy equilibrium condition now yields as before (besides from the trivial ).
Stability of the solutions
Any solution is stableiff a small change in the deformation angle results in a reaction moment trying to restore the original angle of deformation. The net clockwise moment acting on the beam is
An infinitesimal clockwise change of the deformation angle results in a moment
which can be rewritten as
since due to the moment equilibrium condition. Now, a solution is stable iff a clockwise change results in a negative change of moment and vice versa. Thus, the condition for stability becomes
The solution is stable only for , which is expected. By expanding the cosine term in the equation, the approximate stability condition is obtained:
for , which the two other solutions satisfy. Hence, these solutions are stable.
Multiple degrees of freedom-systems
Elastic instability, 2 degrees of freedom
By attaching another rigid beam to the original system by means of an angular spring a two degrees of freedom-system is obtained. Assume for simplicity that the beam lengths and angular springs are equal. The equilibrium conditions become
where and are the angles of the two beams. Linearizing by assuming these angles are small yields
The non-trivial solutions to the system is obtained by finding the roots of the determinant of the system matrix, i.e. for
Thus, for the two degrees of freedom-system there are two critical values for the applied force F. These correspond to two different modes of deformation which can be computed from the nullspace of the system matrix. Dividing the equations by yields
For the lower critical force the ratio is positive and the two beams deflect in the same direction while for the higher force they form a "banana" shape. These two states of deformation represent the bucklingmode shapes of the system.
Theory of elastic stability, S. Timoshenko and J. Gere
Related Research Articles
In physics, the cross section is a measure of probability that a specific process will take place in a collision of two particles. For example, the Rutherford cross-section is a measure of probability that an alpha-particle will be deflected by a given angle during a collision with an atomic nucleus. Cross section is typically denoted σ (sigma) and is expressed in terms of the transverse area that the incident particle must hit in order for the given process to occur.
In mathematical physics and mathematics, the Pauli matrices are a set of three 2 × 2 complex matrices which are Hermitian and unitary. Usually indicated by the Greek letter sigma, they are occasionally denoted by tau when used in connection with isospin symmetries. They are
Tidal acceleration is an effect of the tidal forces between an orbiting natural satellite, and the primary planet that it orbits. The acceleration causes a gradual recession of a satellite in a prograde orbit away from the primary, and a corresponding slowdown of the primary's rotation. The process eventually leads to tidal locking, usually of the smaller first, and later the larger body. The Earth–Moon system is the best-studied case.
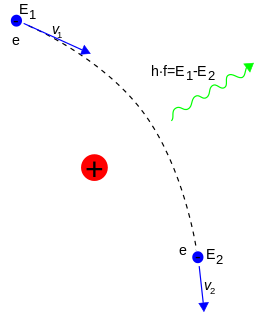
Bremsstrahlung, from bremsen "to brake" and Strahlung "radiation"; i.e., "braking radiation" or "deceleration radiation", is electromagnetic radiation produced by the deceleration of a charged particle when deflected by another charged particle, typically an electron by an atomic nucleus. The moving particle loses kinetic energy, which is converted into radiation, thus satisfying the law of conservation of energy. The term is also used to refer to the process of producing the radiation. Bremsstrahlung has a continuous spectrum, which becomes more intense and whose peak intensity shifts toward higher frequencies as the change of the energy of the decelerated particles increases.
Angular displacement of a body is the angle in radians through which a point revolves around a centre or line has been rotated in a specified sense about a specified axis. When a body rotates about its axis, the motion cannot simply be analyzed as a particle, as in circular motion it undergoes a changing velocity and acceleration at any time (t). When dealing with the rotation of a body, it becomes simpler to consider the body itself rigid. A body is generally considered rigid when the separations between all the particles remains constant throughout the body's motion, so for example parts of its mass are not flying off. In a realistic sense, all things can be deformable, however this impact is minimal and negligible. Thus the rotation of a rigid body over a fixed axis is referred to as rotational motion.
In mathematics and physical science, spherical harmonics are special functions defined on the surface of a sphere. They are often employed in solving partial differential equations in many scientific fields.
An inverted pendulum is a pendulum that has its center of mass above its pivot point. It is unstable and without additional help will fall over. It can be suspended stably in this inverted position by using a control system to monitor the angle of the pole and move the pivot point horizontally back under the center of mass when it starts to fall over, keeping it balanced. The inverted pendulum is a classic problem in dynamics and control theory and is used as a benchmark for testing control strategies. It is often implemented with the pivot point mounted on a cart that can move horizontally under control of an electronic servo system as shown in the photo; this is called a cart and pole apparatus. Most applications limit the pendulum to 1 degree of freedom by affixing the pole to an axis of rotation. Whereas a normal pendulum is stable when hanging downwards, an inverted pendulum is inherently unstable, and must be actively balanced in order to remain upright; this can be done either by applying a torque at the pivot point, by moving the pivot point horizontally as part of a feedback system, changing the rate of rotation of a mass mounted on the pendulum on an axis parallel to the pivot axis and thereby generating a net torque on the pendulum, or by oscillating the pivot point vertically. A simple demonstration of moving the pivot point in a feedback system is achieved by balancing an upturned broomstick on the end of one's finger.
In analytical mechanics, the term generalized coordinates refers to the parameters that describe the configuration of the system relative to some reference configuration. These parameters must uniquely define the configuration of the system relative to the reference configuration. This is done assuming that this can be done with a single chart. The generalized velocities are the time derivatives of the generalized coordinates of the system.
In physics, the Rabi cycle is the cyclic behaviour of a two-level quantum system in the presence of an oscillatory driving field. A great variety of physical processes belonging to the areas of quantum computing, condensed matter, atomic and molecular physics, and nuclear and particle physics can be conveniently studied in terms of two-level quantum mechanical systems, and exhibit Rabi flopping when coupled to an oscillatory driving field. The effect is important in quantum optics, magnetic resonance and quantum computing, and is named after Isidor Isaac Rabi.
The rigid rotor is a mechanical model of rotating systems. An arbitrary rigid rotor is a 3-dimensional rigid object, such as a top. To orient such an object in space requires three angles, known as Euler angles. A special rigid rotor is the linear rotor requiring only two angles to describe, for example of a diatomic molecule. More general molecules are 3-dimensional, such as water, ammonia, or methane. The rigid-rotor Schroedinger equation is discussed in Section 11.2 on pages 240-253 of the textbook by Bunker and Jensen.
Euler–Bernoulli beam theory is a simplification of the linear theory of elasticity which provides a means of calculating the load-carrying and deflection characteristics of beams. It covers the case for small deflections of a beam that are subjected to lateral loads only. It is thus a special case of Timoshenko beam theory. It was first enunciated circa 1750, but was not applied on a large scale until the development of the Eiffel Tower and the Ferris wheel in the late 19th century. Following these successful demonstrations, it quickly became a cornerstone of engineering and an enabler of the Second Industrial Revolution.
In particle physics, neutral particle oscillation is the transmutation of a particle with zero electric charge into another neutral particle due to a change of a non-zero internal quantum number via an interaction that does not conserve that quantum number. For example, a neutron cannot transmute into an antineutron as that would violate the conservation of baryon number. But in those hypothetical extensions of the Standard Model which include interactions that do not strictly conserve baryon number, neutron–antineutron oscillations are predicted to occur.
Mueller calculus is a matrix method for manipulating Stokes vectors, which represent the polarization of light. It was developed in 1943 by Hans Mueller. In this technique, the effect of a particular optical element is represented by a Mueller matrix—a 4×4 matrix that is an overlapping generalization of the Jones matrix.
A pendulum is a body suspended from a fixed support so that it swings freely back and forth under the influence of gravity. When a pendulum is displaced sideways from its resting, equilibrium position, it is subject to a restoring force due to gravity that will accelerate it back toward the equilibrium position. When released, the restoring force acting on the pendulum's mass causes it to oscillate about the equilibrium position, swinging it back and forth. The mathematics of pendulums are in general quite complicated. Simplifying assumptions can be made, which in the case of a simple pendulum allow the equations of motion to be solved analytically for small-angle oscillations.
Photon polarization is the quantum mechanical description of the classical polarized sinusoidal plane electromagnetic wave. An individual photon can be described as having right or left circular polarization, or a superposition of the two. Equivalently, a photon can be described as having horizontal or vertical linear polarization, or a superposition of the two.
Zero sound is the name given by Lev Landau to the unique quantum vibrations in quantum Fermi liquids.
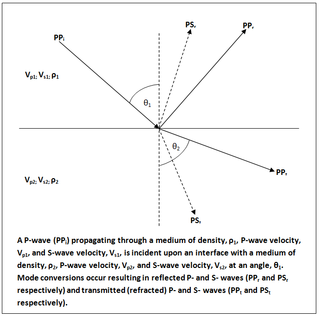
In geophysics and reflection seismology, the Zoeppritz equations are a set of equations that describe the partitioning of seismic wave energy at an interface, typically a boundary between two different layers of rock. They are named after their author, the German geophysicist Karl Bernhard Zoeppritz, who died before they were published in 1919.
The scattering length in quantum mechanics describes low-energy scattering. For potentials that decay faster than as , it is defined as the following low-energy limit:
The Carter constant is a conserved quantity for motion around black holes in the general relativistic formulation of gravity. Carter's constant was derived for a spinning, charged black hole by Australian theoretical physicist Brandon Carter in 1968. Carter's constant along with the energy, axial angular momentum, and particle rest mass provide the four conserved quantities necessary to uniquely determine all orbits in the Kerr–Newman spacetime.
Partial wave analysis, in the context of quantum mechanics, refers to a technique for solving scattering problems by decomposing each wave into its constituent angular momentum components and solving using boundary conditions.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.