
Sonar is a technique that uses sound propagation to navigate, measure distances (ranging), communicate with or detect objects on or under the surface of the water, such as other vessels. Two types of technology share the name "sonar": passive sonar is essentially listening for the sound made by vessels; active sonar is emitting pulses of sounds and listening for echoes. Sonar may be used as a means of acoustic location and of measurement of the echo characteristics of "targets" in the water. Acoustic location in air was used before the introduction of radar. Sonar may also be used for robot navigation, and SODAR is used for atmospheric investigations. The term sonar is also used for the equipment used to generate and receive the sound. The acoustic frequencies used in sonar systems vary from very low (infrasonic) to extremely high (ultrasonic). The study of underwater sound is known as underwater acoustics or hydroacoustics.

A buoy is a floating device that can have many purposes. It can be anchored (stationary) or allowed to drift with ocean currents.

The Naval Undersea Warfare Center (NUWC) is the United States Navy's full-spectrum research, development, test and evaluation, engineering and fleet support center for submarines, autonomous underwater systems, and offensive and defensive weapons systems associated with undersea warfare. It is one of the corporate laboratories of the Naval Sea Systems Command. NUWC is headquartered in Newport, Rhode Island and has two major subordinate activities: Division Newport and Division Keyport in Keyport, Washington. NUWC also controls the Fox Island facility and Gould Island. It employs more than 4,400 civilian and military personnel, with budgets over $1 billion.
Communication with submarines is a field within military communications that presents technical challenges and requires specialized technology. Because radio waves do not travel well through good electrical conductors like salt water, submerged submarines are cut off from radio communication with their command authorities at ordinary radio frequencies. Submarines can surface and raise an antenna above the sea level, then use ordinary radio transmissions, however this makes them vulnerable to detection by anti-submarine warfare forces. Early submarines during World War II mostly traveled on the surface because of their limited underwater speed and endurance; they dived mainly to evade immediate threats. During the Cold War, however, nuclear-powered submarines were developed that could stay submerged for months. In the event of a nuclear war, submerged ballistic missile submarines have to be ordered quickly to launch their missiles. Transmitting messages to these submarines is an active area of research. Very low frequency (VLF) radio waves can penetrate seawater a few hundred feet, and many navies use powerful shore VLF transmitters for submarine communications. A few nations have built transmitters which use extremely low frequency (ELF) radio waves, which can penetrate seawater to reach submarines at operating depths, but these require huge antennas. Other techniques that have been used include sonar and blue lasers.

A sonobuoy is a relatively small buoy - typically 13 cm (5 in) diameter and 91 cm (3 ft) long - expendable sonar system that is dropped/ejected from aircraft or ships conducting anti-submarine warfare or underwater acoustic research.
An acoustic Doppler current profiler (ADCP) is a hydroacoustic current meter similar to a sonar, used to measure water current velocities over a depth range using the Doppler effect of sound waves scattered back from particles within the water column. The term ADCP is a generic term for all acoustic current profilers, although the abbreviation originates from an instrument series introduced by RD Instruments in the 1980s. The working frequencies range of ADCPs range from 38 kHz to several Megahertz. The device used in the air for wind speed profiling using sound is known as SODAR and works with the same underlying principles.
A scientific echosounder is a device which uses sonar technology for the measurement of underwater physical and biological components—this device is also known as scientific sonar. Applications include bathymetry, substrate classification, studies of aquatic vegetation, fish, and plankton, and differentation of water masses.

Sodar, or in full sonic detection and ranging, is a meteorological instrument used as a wind profiler to measure the scattering of sound waves by atmospheric turbulence. SODAR systems are used to measure wind speed at various heights above the ground, and the thermodynamic structure of the lower layer of the atmosphere.

USNS Titan (T-AGOS-15) was a Stalwart-class modified tactical auxiliary general ocean surveillance ship in service in the United States Navy from 1989 to 1993. From 1996 to 2014, she was in commission in the National Oceanic and Atmospheric Administration (NOAA) fleet as the oceanographic research ship NOAAS Ka'imimoana.
Geophysical MASINT is a branch of Measurement and Signature Intelligence (MASINT) that involves phenomena transmitted through the earth and manmade structures including emitted or reflected sounds, pressure waves, vibrations, and magnetic field or ionosphere disturbances.
A self-locating datum marker buoy (SLDMB) is a drifting surface buoy designed to measure surface ocean currents. The design is based on those of the Coastal Ocean Dynamics Experiment (CODE) and Davis-style oceanographic surface drifters – National Science Foundation (NSF) funded experiments exploring ocean surface currents. The SLDMB was designed for deployment by United States Coast Guard (USCG) vessels in search and rescue (SAR) missions, and is equipped with a Global Positioning Satellite (GPS) sensor that, upon deployment in fresh- or saltwater, transmits its location periodically to the USCG to aid in SAR missions. Additionally, SLDMB are deployed in oceanographic research in order to study surface currents of the ocean. This design has also been utilized by Nomis Connectivity for secure ocean-based communications.
An acoustic release is an oceanographic device for the deployment and subsequent recovery of instrumentation from the sea floor, in which the recovery is triggered remotely by an acoustic command signal.
An underwater acoustic positioning system is a system for the tracking and navigation of underwater vehicles or divers by means of acoustic distance and/or direction measurements, and subsequent position triangulation. Underwater acoustic positioning systems are commonly used in a wide variety of underwater work, including oil and gas exploration, ocean sciences, salvage operations, marine archaeology, law enforcement and military activities.

A short baseline (SBL) acoustic positioning system is one of three broad classes of underwater acoustic positioning systems that are used to track underwater vehicles and divers. The other two classes are ultra short baseline systems (USBL) and long baseline systems (LBL). Like USBL systems, SBL systems do not require any seafloor mounted transponders or equipment and are thus suitable for tracking underwater targets from boats or ships that are either anchored or under way. However, unlike USBL systems, which offer a fixed accuracy, SBL positioning accuracy improves with transducer spacing. Thus, where space permits, such as when operating from larger vessels or a dock, the SBL system can achieve a precision and position robustness that is similar to that of sea floor mounted LBL systems, making the system suitable for high-accuracy survey work. When operating from a smaller vessel where transducer spacing is limited, the SBL system will exhibit reduced precision.

A long baseline (LBL) acoustic positioning system is one of three broad classes of underwater acoustic positioning systems that are used to track underwater vehicles and divers. The other two classes are ultra short baseline systems (USBL) and short baseline systems (SBL). LBL systems are unique in that they use networks of sea-floor mounted baseline transponders as reference points for navigation. These are generally deployed around the perimeter of a work site. The LBL technique results in very high positioning accuracy and position stability that is independent of water depth. It is generally better than 1-meter and can reach a few centimeters accuracy. LBL systems are generally employed for precision underwater survey work where the accuracy or position stability of ship-based positioning systems does not suffice.
GPS aircraft tracking is a means of tracking the position of an aircraft fitted with a GPS receiver. By communication with GPS satellites, detailed real-time data on flight variables can be passed to a server on the ground. This server stores the flight data, which can then be transmitted via telecommunications networks to organizations wishing to interpret it.

The AN/AQS-13 series was a helicopter dipping sonar system for the United States Navy. These systems were deployed as the primary inner zone anti-submarine warfare (ASW) sensor on aircraft carrier based helicopters for over five decades. Companion versions with the AQS-18 designation were exported to various nations around the globe.
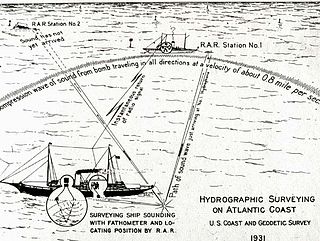
Radio acoustic ranging, occasionally written as "radio-acoustic ranging" and sometimes abbreviated RAR, was a method for determining a ship's precise location at sea by detonating an explosive charge underwater near the ship, detecting the arrival of the underwater sound waves at remote locations, and radioing the time of arrival of the sound waves at the remote stations to the ship, allowing the ship's crew to use true range multilateration to determine the ship's position. Developed by the United States Coast and Geodetic Survey in 1923 and 1924 for use in accurately fixing the position of survey ships during hydrographic survey operations, it was the first navigation technique in human history other than dead reckoning that did not require visual observation of a landmark, marker, light, or celestial body, and the first non-visual means to provide precise positions. First employed operationally in 1924, radio acoustic ranging remained in use until 1944, when new radio navigation techniques developed during World War II rendered it obsolete.
The Missile Impact Location System or Missile Impact Locating System (MILS) is an ocean acoustic system designed to locate the impact position of test missile nose cones at the ocean's surface and then the position of the cone itself for recovery from the ocean bottom. The systems were installed in the missile test ranges managed by the U.S. Air Force.

