In physics and mathematics, the phase of a wave or other periodic function of some real variable is an angle-like quantity representing the fraction of the cycle covered up to . It is expressed in such a scale that it varies by one full turn as the variable goes through each period. It may be measured in any angular unit such as degrees or radians, thus increasing by 360° or as the variable completes a full period.

In physics, the twin paradox is a thought experiment in special relativity involving twins, one of whom takes a space voyage at relativistic speeds and returns home to find that the twin who remained on Earth has aged more. This result appears puzzling because each twin sees the other twin as moving, and so, as a consequence of an incorrect and naive application of time dilation and the principle of relativity, each should paradoxically find the other to have aged less. However, this scenario can be resolved within the standard framework of special relativity: the travelling twin's trajectory involves two different inertial frames, one for the outbound journey and one for the inbound journey. Another way to understand the paradox is to realize the travelling twin is undergoing acceleration, which makes them a non-inertial observer. In both views there is no symmetry between the spacetime paths of the twins. Therefore, the twin paradox is not actually a paradox in the sense of a logical contradiction. There is still debate as to the resolution of the twin paradox.
In signal processing, group delay and phase delay are two related ways of describing how a signal's frequency components are delayed in time when passing through a linear time-invariant (LTI) system. Phase delay describes the time shift of a sinusoidal component. Group delay describes the time shift of the envelope of a wave packet, a "pack" or "group" of oscillations centered around one frequency that travel together, formed for instance by multiplying a sine wave by an envelope.
A phase-locked loop or phase lock loop (PLL) is a control system that generates an output signal whose phase is fixed relative to the phase of an input signal. Keeping the input and output phase in lockstep also implies keeping the input and output frequencies the same, thus a phase-locked loop can also track an input frequency. And by incorporating a frequency divider, a PLL can generate a stable frequency that is a multiple of the input frequency.
Coherence expresses the potential for two waves to interfere. Two monochromatic beams from a single source always interfere. Wave sources are not strictly monochromatic: they may be partly coherent. Beams from different sources are mutually incoherent.

A voltage-controlled oscillator (VCO) is an electronic oscillator whose oscillation frequency is controlled by a voltage input. The applied input voltage determines the instantaneous oscillation frequency. Consequently, a VCO can be used for frequency modulation (FM) or phase modulation (PM) by applying a modulating signal to the control input. A VCO is also an integral part of a phase-locked loop. VCOs are used in synthesizers to generate a waveform whose pitch can be adjusted by a voltage determined by a musical keyboard or other input.

Dilution of precision (DOP), or geometric dilution of precision (GDOP), is a term used in satellite navigation and geomatics engineering to specify the error propagation as a mathematical effect of navigation satellite geometry on positional measurement precision.
In pulsed radar and sonar signal processing, an ambiguity function is a two-dimensional function of propagation delay and Doppler frequency , . It represents the distortion of a returned pulse due to the receiver matched filter of the return from a moving target. The ambiguity function is defined by the properties of the pulse and of the filter, and not any particular target scenario.
Pseudo-range multilateration, often simply multilateration (MLAT) when in context, is a technique for determining the position of an unknown point, such as a vehicle, based on measurement of biased times of flight (TOFs) of energy waves traveling between the vehicle and multiple stations at known locations. TOFs are biased by synchronization errors in the difference between times of arrival (TOA) and times of transmission (TOT): TOF=TOA-TOT. Pseudo-ranges (PRs) are TOFs multiplied by the wave propagation speed: PR=TOF ⋅ s. In general, the stations' clocks are assumed synchronized but the vehicle's clock is desynchronized.

Acoustic location is a method of determining the position of an object or sound source by using sound waves. Location can take place in gases, liquids, and in solids.
Fluorescence anisotropy or fluorescence polarization is the phenomenon where the light emitted by a fluorophore has unequal intensities along different axes of polarization. Early pioneers in the field include Aleksander Jablonski, Gregorio Weber, and Andreas Albrecht. The principles of fluorescence polarization and some applications of the method are presented in Lakowicz's book.
Radar engineering is the design of technical aspects pertaining to the components of a radar and their ability to detect the return energy from moving scatterers — determining an object's position or obstruction in the environment. This includes field of view in terms of solid angle and maximum unambiguous range and velocity, as well as angular, range and velocity resolution. Radar sensors are classified by application, architecture, radar mode, platform, and propagation window.
3D sound localization refers to an acoustic technology that is used to locate the source of a sound in a three-dimensional space. The source location is usually determined by the direction of the incoming sound waves and the distance between the source and sensors. It involves the structure arrangement design of the sensors and signal processing techniques.
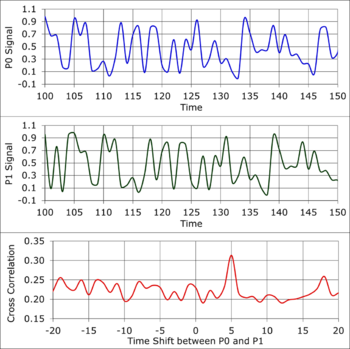
Super-resolution optical fluctuation imaging (SOFI) is a post-processing method for the calculation of super-resolved images from recorded image time series that is based on the temporal correlations of independently fluctuating fluorescent emitters.
The chirp pulse compression process transforms a long duration frequency-coded pulse into a narrow pulse of greatly increased amplitude. It is a technique used in radar and sonar systems because it is a method whereby a narrow pulse with high peak power can be derived from a long duration pulse with low peak power. Furthermore, the process offers good range resolution because the half-power beam width of the compressed pulse is consistent with the system bandwidth.
Channel sounding is a technique that evaluates a radio environment for wireless communication, especially MIMO systems. Because of the effect of terrain and obstacles, wireless signals propagate in multiple paths. To minimize or use the multipath effect, engineers use channel sounding to process the multidimensional spatial–temporal signal and estimate channel characteristics. This helps simulate and design wireless systems.
Steered-response power (SRP) is a family of acoustic source localization algorithms that can be interpreted as a beamforming-based approach that searches for the candidate position or direction that maximizes the output of a steered delay-and-sum beamformer.

High Resolution Wide Swath (HRWS) imaging is an important branch in synthetic aperture radar (SAR) imaging, a remote sensing technique capable of providing high resolution images independent of weather conditions and sunlight illumination. This makes SAR very attractive for the systematic observation of dynamic processes on the Earth's surface, which is useful for environmental monitoring, earth resource mapping and military systems.
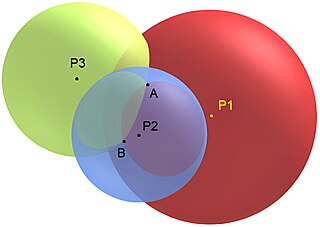
Trilateration is the use of distances for determining the unknown position coordinates of a point of interest, often around Earth (geopositioning). When more than three distances are involved, it may be called multilateration, for emphasis.
Ultra-wideband impulse radio ranging is a wireless positioning technology based on IEEE 802.15.4z standard, which is a wireless communication protocol introduced by IEEE, for systems operating in unlicensed spectrum, equipped with extremely large bandwidth transceivers. UWB enables very accurate ranging without introducing significant interference with narrowband systems. To achieve these stringent requirements, UWB-IR systems exploit the available bandwidth that they support, which guarantees very accurate timing and robustness against multipath, especially in indoor environments. The available bandwidth also enables UWB systems to spread the signal power over a large spectrum, avoiding narrowband interference.