
Assistive technology (AT) is a term for assistive, adaptive, and rehabilitative devices for people with disabilities and the elderly. Disabled people often have difficulty performing activities of daily living (ADLs) independently, or even with assistance. ADLs are self-care activities that include toileting, mobility (ambulation), eating, bathing, dressing, grooming, and personal device care. Assistive technology can ameliorate the effects of disabilities that limit the ability to perform ADLs. Assistive technology promotes greater independence by enabling people to perform tasks they were formerly unable to accomplish, or had great difficulty accomplishing, by providing enhancements to, or changing methods of interacting with, the technology needed to accomplish such tasks. For example, wheelchairs provide independent mobility for those who cannot walk, while assistive eating devices can enable people who cannot feed themselves to do so. Due to assistive technology, disabled people have an opportunity of a more positive and easygoing lifestyle, with an increase in "social participation", "security and control", and a greater chance to "reduce institutional costs without significantly increasing household expenses." In schools, assistive technology can be critical in allowing students with disabilities to access the general education curriculum. Students who experience challenges writing or keyboarding, for example, can use voice recognition software instead. Assistive technologies assist people who are recovering from strokes and people who have sustained injuries that affect their daily tasks.

In science fiction, mecha or mechs are giant robots or machines typically depicted as piloted and as humanoid walking vehicles. The term was first used in Japanese after shortening the English loanword 'mechanism' or 'mechanical', but the meaning in Japanese is more inclusive, and 'robot' or 'giant robot' is the narrower term.

A tremor is an involuntary, somewhat rhythmic, muscle contraction and relaxation involving oscillations or twitching movements of one or more body parts. It is the most common of all involuntary movements and can affect the hands, arms, eyes, face, head, vocal folds, trunk, and legs. Most tremors occur in the hands. In some people, a tremor is a symptom of another neurological disorder.

In medicine, a prosthesis, or a prosthetic implant, is an artificial device that replaces a missing body part, which may be lost through trauma, disease, or a condition present at birth. Prostheses are intended to restore the normal functions of the missing body part. Amputee rehabilitation is primarily coordinated by a physiatrist as part of an inter-disciplinary team consisting of physiatrists, prosthetists, nurses, physical therapists, and occupational therapists. Prostheses can be created by hand or with computer-aided design (CAD), a software interface that helps creators design and analyze the creation with computer-generated 2-D and 3-D graphics as well as analysis and optimization tools.

Human Universal Load Carrier, or HULC, is an un-tethered, hydraulic-powered anthropomorphic exoskeleton developed by Professor H. Kazerooni and his team at Ekso Bionics. It is intended to help soldiers in combat carry a load of up to 200 pounds at a top speed of 10 miles per hour for extended periods of time. After being under development at Berkeley Robotics and Human Engineering Laboratory since 2000, the system was announced publicly at the AUSA Winter Symposium on February 26, 2009, when an exclusive licensing agreement was reached with Lockheed Martin. Although the exoskeleton is powered and can be used, the project was a failure as it hindered certain movements and actually increased strain on muscles, going directly against what a powered exoskeleton is supposed to do.
ReWalk is a commercial bionic walking assistance system that uses powered leg attachments to enable paraplegics to stand upright, walk and climb stairs. The system is powered by a backpack battery, and is controlled by a simple wrist-mounted remote which detects and enhances the user's movements. Designed in Yokneam, Israel, by Amit Goffer, the ReWalk is marketed by ReWalk Robotics Ltd, and is priced at approximately US$85,000 per unit.

Cyberdyne is a Japanese robotics and technology company most noted for the marketing and distribution of the HAL robotic exoskeleton suit.
Rehabilitation robotics is a field of research dedicated to understanding and augmenting rehabilitation through the application of robotic devices. Rehabilitation robotics includes development of robotic devices tailored for assisting different sensorimotor functions(e.g. arm, hand, leg, ankle), development of different schemes of assisting therapeutic training, and assessment of sensorimotor performance of patient; here, robots are used mainly as therapy aids instead of assistive devices. Rehabilitation using robotics is generally well tolerated by patients, and has been found to be an effective adjunct to therapy in individuals with motor impairments, especially due to stroke.

A powered exoskeleton is a mobile machine that is wearable over all or part of the human body, providing ergonomic structural support and powered by a system of electric motors, pneumatics, levers, hydraulics or a combination of cybernetic technologies, while allowing for sufficient limb movement with increased strength and endurance. The exoskeleton is designed to provide better mechanical load tolerance, and its control system aims to sense and synchronize with the user's intended motion and relay the signal to motors which manage the gears. The exoskeleton also protects the user's shoulder, waist, back and thigh against overload, and stabilizes movements when lifting and holding heavy items.
Homayoon Kazerooni is an Iranian-born American roboticist, mechanical engineering, and professor. He serves as a professor of mechanical engineering, and the director of the Berkeley Robotics and Human Engineering Laboratory at the University of California, Berkeley. Kazerooni is also the co-founder of Ekso Bionics and SuitX. As a noted authority on robotics, he is frequently profiled and quoted in the media.

Ekso Bionics Holdings Inc. is a company that develops and manufactures powered exoskeleton bionic devices that can be strapped on as wearable robots to enhance the strength, mobility, and endurance of industrial workers and people experiencing paralysis and mobility issues after a brain injury, stroke, multiple sclerosis (MS) or spinal cord injury. They enable individuals with any amount of lower extremity weakness, including those who are paralyzed, to stand up and walk.
LW3 is a para-alpine and para-Nordic standing skiing sport class defined by the International Paralympic Committee (IPC) for skiers with a disability affecting both legs, with double below knee amputation or a combined strength total for both legs of 60, with 80 as the baseline for people without disabilities. For international skiing competitions, classification is done through IPC Alpine Skiing or IPC Nordic Skiing. The classification has two subclasses for para-alpine skiing: LW3.1 which is for people with double below the knee amputations or similar disabilities, and LW3.2 which is for people with cerebral palsy that involves moderate athetoid, moderate ataxic impairment or slight diplegic involvement.
The Vanderbilt exoskeleton, marketed as Indego, is a powered exoskeleton designed by the Center for Intelligent Mechatronics at Vanderbilt University in the U.S. state of Tennessee. It is intended to assist paraplegics, stroke victims and other paralyzed or semi-paralyzed people to walk independently. Motion and control technologies manufacturer Parker Hannifin is funding further development, and plans to release the first commercial version of the exoskeleton in 2015.
The Maintenance Equipment Integrated System of Telecontrol Robot (MEISTeR) is a service robot by the Mitsubishi Heavy Industries (MHI). It was specifically designed to work at the devastated Fukushima Daiichi Nuclear Power Plant.
Neuromechanics of orthoses refers to how the human body interacts with orthoses. Millions of people in the U.S. suffer from stroke, multiple sclerosis, postpolio, spinal cord injuries, or various other ailments that benefit from the use of orthoses. Insofar as active orthoses and powered exoskeletons are concerned, the technology to build these devices is improving rapidly, but little research has been done on the human side of these human-machine interfaces.
Atlas is a bipedal humanoid robot primarily developed by the American robotics company Boston Dynamics with funding and oversight from the U.S. Defense Advanced Research Projects Agency (DARPA). The robot was initially designed for a variety of search and rescue tasks, and was unveiled to the public on July 11, 2013.
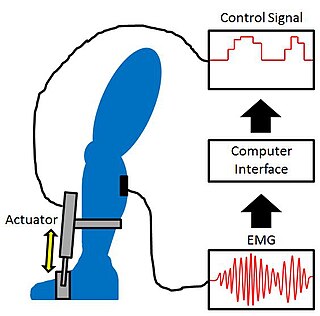
Proportional myoelectric control can be used to activate robotic lower limb exoskeletons. A proportional myoelectric control system utilizes a microcontroller or computer that inputs electromyography (EMG) signals from sensors on the leg muscle(s) and then activates the corresponding joint actuator(s) proportionally to the EMG signal.
Yoshiyuki Sankai is a Japanese billionaire businessman and academic, the founder, president and CEO of the cyborg-robot maker Cyberdyne; and professor of the Graduate School of Systems & Information Engineering at the University of Tsukuba.
A soft exoskeleton, also known as a soft wearable robot or a soft robotic exosuit, is a type of wearable robotic device designed to augment and enhance the physical abilities of the human body. Unlike traditional rigid exoskeletons, which are typically made of hard materials like metal and are worn over the user's limbs, soft exoskeletons are constructed from flexible and lightweight materials. Soft exoskeletons are designed to assist individuals with mobility impairments, aid in rehabilitation, augment human performance, and improve overall quality of life.
