
A propeller is a device with a rotating hub and radiating blades that are set at a pitch to form a helical spiral which, when rotated, exerts linear thrust upon a working fluid such as water or air. Propellers are used to pump fluid through a pipe or duct, or to create thrust to propel a boat through water or an aircraft through air. The blades are shaped so that their rotational motion through the fluid causes a pressure difference between the two surfaces of the blade by Bernoulli's principle which exerts force on the fluid. Most marine propellers are screw propellers with helical blades rotating on a propeller shaft with an approximately horizontal axis.
A tugboat or tug is a marine vessel that manoeuvres other vessels by pushing or pulling them, with direct contact or a tow line. These boats typically tug ships in circumstances where they cannot or should not move under their own power, such as in crowded harbors or narrow canals, or cannot move at all, such as barges, disabled ships, log rafts, or oil platforms. Some are ocean-going, and some are icebreakers or salvage tugs. Early models were powered by steam engines, which were later superseded by diesel engines. Many have deluge gun water jets, which help in firefighting, especially in harbours.

An azimuth thruster is a configuration of marine propellers placed in pods that can be rotated to any horizontal angle (azimuth), making a rudder redundant. These give ships better maneuverability than a fixed propeller and rudder system.

On a ship, the engine room (ER) is the compartment where the machinery for marine propulsion is located. The engine room is generally the largest physical compartment of the machinery space. It houses the vessel's prime mover, usually some variations of a heat engine. On some ships, there may be more than one engine room, such as forward and aft, or port or starboard engine rooms, or may be simply numbered. To increase a vessel's safety and chances of surviving damage, the machinery necessary for the ship's operation may be segregated into various spaces.
A propulsor is a mechanical device that gives propulsion. The word is commonly used in the marine vernacular, and implies a mechanical assembly that is more complicated than a propeller. The Kort nozzle, pump-jet and rim-driven thruster are examples.

The Voith Schneider Propeller (VSP) is a specialized marine propulsion system (MPS) manufactured by the Voith Group based on a cyclorotor design. It is highly maneuverable, being able to change the direction of its thrust almost instantaneously. It is widely used on tugs and ferries.

A Z-drive is a type of marine propulsion unit. Specifically, it is an azimuth thruster. The pod can rotate 360 degrees allowing for rapid changes in thrust direction and thus vessel direction. This eliminates the need for a conventional rudder.

Azipod is a trademarked azimuth thruster pod design, a marine propulsion unit consisting of a fixed pitch propeller mounted on a steerable gondola ("pod") containing the electric motor driving the propeller, allowing ships to be more maneuverable. They were developed in Finland in the late 1980s jointly by Wärtsilä Marine, Strömberg and the Finnish National Board of Navigation.

Manoeuvering thrusters are transversal propulsion devices built into or mounted to either the bow or stern of a ship or boat to make it more manoeuvrable. Bow thrusters make docking easier, since they allow the captain to turn the vessel to port or starboard side, without using the main propulsion mechanism which requires some forward motion for turning; The effectiveness of a thruster is curtailed by any forward motion due to the Coandă effect. A stern thruster is of the same principle, fitted at the stern. Sufficiently large vessels often have multiple bow thrusters and stern thrusters.

Astern propulsion is a maneuver in which a ship's propelling mechanism is used to develop thrust in a retrograde direction. Astern propulsion does not necessarily imply the ship is moving astern ; astern propulsion is used to slow a ship by applying a force in the direction of the bow of the ship, instead of the stern. The equivalent concept for an airplane is thrust reversal.

The Kitchen rudder is the familiar name for "Kitchen's Patent Reversing Rudders", a combination rudder and directional propulsion delivery system for relatively slow speed displacement boats which was invented in the early 20th century by John G. A. Kitchen of Lancashire, England. It turns the rudder into a directional thruster, and allows the engine to maintain constant revolutions and direction of drive shaft rotation while altering thrust by use of a control which directs thrust forward or aft. Only the rudder pivots; the propeller itself is on a fixed shaft and does not.
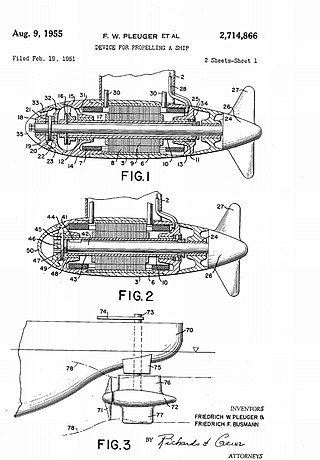
The Pleuger rudder is a power assisted ship's rudder. It creates a flow of water in the direction the rudder points powered by an auxiliary electric motor. This aids maneuverability at low speeds greatly, since it operates on a similar principle to a thruster.
Internal drive propulsion or water-jet propulsion is a form of marine propulsion used in recreational boating. Like other forms of motorized boating, internal drive propulsion employs a motor that turns a propeller to move the boat forward. The primary difference between internal drive boats and external drive boats is that the propeller is enclosed inside the hull of an internal drive boat whereas the propeller is exposed outside the hull of a stern drive, V-drive or straight shaft drive boat.

A Schilling rudder is a specific type of profiled rudder used on certain boats and ships. The rudder is typically described as 'shaped like a fishtail'.

A ducted propeller, also known as a Kort nozzle, is a marine propeller fitted with a non-rotating nozzle. It is used to improve the efficiency of the propeller and is especially used on heavily loaded propellers or propellers with limited diameter. It was developed first by Luigi Stipa (1931) and later by Ludwig Kort (1934). The Kort nozzle is a shrouded propeller assembly for marine propulsion. The cross-section of the shroud has the form of a foil, and the shroud can offer hydrodynamic advantages over bare propellers, under certain conditions.

RVSikuliaq is an American research vessel owned by the National Science Foundation and operated by the University of Alaska Fairbanks College of Fisheries and Ocean Sciences. Built in 2014 by Marinette Marine Corporation in Marinette, Wisconsin, the $200 million vessel replaced the 1966-built research vessel Alpha Helix that was retired in 2007. Sikuliaq, named after the Iñupiaq word for "young sea ice" and pronounced "see-KOO-lee-auk", is homeported in Seward, Alaska.

The rim-driven thruster, also known as rim-driven propulsor/propeller is a novel type of electric propulsion unit for ships. The concept was proposed by Kort around 1940, but only became commercially practical in the early 21st century due to advances in DC motor controller technology. As of 2017, commercial models of between 500 kW and 3 MW are available from manufacturers such as Rolls-Royce, Schottel, Brunvoll, Baliño, Voith, Van der Velden, etc.
Schottel is a manufacturer of propulsion and steering systems for ships and offshore applications. The company founder Josef Becker invented the rudderpropeller, a z-drive, in 1950. Today the company develops and manufactures azimuth propulsion, maneuvering and steering systems. In 2014 the subsidiary Schottel Hydro was founded to bundle up the company activities in the hydrokinetic energy segment.
An underwater thruster is a configuration of marine propellers and hydraulic or electric motor built into or mounted to an underwater robot as a propulsion device. These give the robot movement and maneuverability against sea water resistance. The main difference between underwater thrusters and marine thrusters is the ability to work under heavy water pressure, sometime up to full ocean depth.


