Mass point geometry, colloquially known as mass points, is a problem-solving technique in geometry which applies the physical principle of the center of mass to geometry problems involving triangles and intersecting cevians.[1] All problems that can be solved using mass point geometry can also be solved using either similar triangles, vectors, or area ratios,[2] but many students prefer to use mass points. Though modern mass point geometry was developed in the 1960s by New York high school students,[3] the concept has been found to have been used as early as 1827 by August Ferdinand Möbius in his theory of homogeneous coordinates.[4]
The theory of mass points is defined according to the following definitions:[5]
Mass Point - A mass point is a pair , also written as , including a mass, , and an ordinary point, on a plane.
Coincidence - We say that two points and coincide if and only if and .
Addition - The sum of two mass points and has mass and point where is the point on such that . In other words, is the fulcrum point that perfectly balances the points and . An example of mass point addition is shown at right. Mass point addition is closed, commutative, and associative.
Scalar Multiplication - Given a mass point and a positive real scalar, we define multiplication to be . Mass point scalar multiplication is distributive over mass point addition.
Methods
Concurrent cevians
First, a point is assigned with a mass (often a whole number, but it depends on the problem) in the way that other masses are also whole numbers. The principle of calculation is that the foot of a cevian is the addition (defined above) of the two vertices (they are the endpoints of the side where the foot lie). For each cevian, the point of concurrency is the sum of the vertex and the foot. Each length ratio may then be calculated from the masses at the points. See Problem One for an example.
Splitting masses
Splitting masses is the slightly more complicated method necessary when a problem contains transversals in addition to cevians. Any vertex that is on both sides the transversal crosses will have a split mass. A point with a split mass may be treated as a normal mass point, except that it has three masses: one used for each of the two sides it is on, and one that is the sum of the other two split masses and is used for any cevians it may have. See Problem Two for an example.
Other methods
Routh's theorem - Many problems involving triangles with cevians will ask for areas, and mass points does not provide a method for calculating areas. However, Routh's theorem, which goes hand in hand with mass points, uses ratios of lengths to calculate the ratio of areas between a triangle and a triangle formed by three cevians.
Special cevians - When given cevians with special properties, like an angle bisector or an altitude, other theorems may be used alongside mass point geometry that determine length ratios. One very common theorem used likewise is the angle bisector theorem.
Stewart's theorem - When asked not for the ratios of lengths but for the actual lengths themselves, Stewart's theorem may be used to determine the length of the entire segment, and then mass points may be used to determine the ratios and therefore the necessary lengths of parts of segments.
Higher dimensions - The methods involved in mass point geometry are not limited to two dimensions; the same methods may be used in problems involving tetrahedra, or even higher-dimensional shapes, though it is rare that a problem involving four or more dimensions will require use of mass points.
Examples
Diagram for solution to Problem OneDiagram for solution to Problem TwoDiagram for Problem ThreeDiagram for Problem Three, System OneDiagram for Problem Three, System Two
Problem One
Problem. In triangle , is on so that and is on so that . If and intersect at and line intersects at , compute and .
Solution. We may arbitrarily assign the mass of point to be . By ratios of lengths, the masses at and must both be . By summing masses, the masses at and are both . Furthermore, the mass at is , making the mass at have to be Therefore and . See diagram at right.
Problem Two
Problem. In triangle , , , and are on , , and , respectively, so that , , and . If and intersect at , compute and .
Solution. As this problem involves a transversal, we must use split masses on point . We may arbitrarily assign the mass of point to be . By ratios of lengths, the mass at must be and the mass at is split towards and towards . By summing masses, we get the masses at , , and to be , , and , respectively. Therefore and .
Problem Three
Problem. In triangle , points and are on sides and , respectively, and points and are on side with between and . intersects at point and intersects at point . If , , and , compute .
Solution. This problem involves two central intersection points, and , so we must use multiple systems.
System One. For the first system, we will choose as our central point, and we may therefore ignore segment and points , , and . We may arbitrarily assign the mass at to be , and by ratios of lengths the masses at and are and , respectively. By summing masses, we get the masses at , , and to be 10, 9, and 13, respectively. Therefore, and .
System Two. For the second system, we will choose as our central point, and we may therefore ignore segment and points and . As this system involves a transversal, we must use split masses on point . We may arbitrarily assign the mass at to be , and by ratios of lengths, the mass at is and the mass at is split towards and 2 towards . By summing masses, we get the masses at , , and to be 4, 6, and 10, respectively. Therefore, and .
Original System. We now know all the ratios necessary to put together the ratio we are asked for. The final answer may be found as follows:
↑ Rhoad, R., Milauskas, G., and Whipple, R. Geometry for Enjoyment and Challenge. McDougal, Littell & Company, 1991
↑ D. Pedoe Notes on the History of Geometrical Ideas I: Homogeneous Coordinates. Math Magazine (1975), 215-217.
↑ H. S. M. Coxeter, Introduction to Geometry, pp. 216-221, John Wiley & Sons, Inc. 1969
Related Research Articles
In geometry a quadrilateral is a four-sided polygon, having four edges (sides) and four corners (vertices). The word is derived from the Latin words quadri, a variant of four, and latus, meaning "side". It is also called a tetragon, derived from Greek "tetra" meaning "four" and "gon" meaning "corner" or "angle", in analogy to other polygons. Since "gon" means "angle", it is analogously called a quadrangle, or 4-angle. A quadrilateral with vertices , , and is sometimes denoted as .
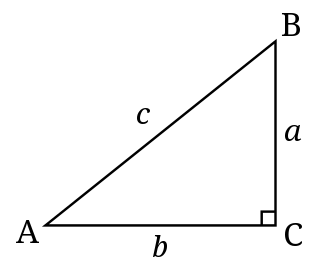
A triangle is a polygon with three corners and three sides, one of the basic shapes in geometry. The corners, also called vertices, are zero-dimensional points while the sides connecting them, also called edges, are one-dimensional line segments. The triangle's interior is a two-dimensional region. Sometimes an arbitrary edge is chosen to be the base, in which case the opposite vertex is called the apex.
In Euclidean geometry, two objects are similar if they have the same shape, or if one has the same shape as the mirror image of the other. More precisely, one can be obtained from the other by uniformly scaling, possibly with additional translation, rotation and reflection. This means that either object can be rescaled, repositioned, and reflected, so as to coincide precisely with the other object. If two objects are similar, each is congruent to the result of a particular uniform scaling of the other.
A right triangle or right-angled triangle, sometimes called an orthogonal triangle or rectangular triangle, is a triangle in which two sides are perpendicular, forming a right angle.
In Euclidean geometry, Ceva's theorem is a theorem about triangles. Given a triangle △ABC, let the lines AO, BO, CO be drawn from the vertices to a common point O, to meet opposite sides at D, E, F respectively. Then, using signed lengths of segments,
In geometry, bisection is the division of something into two equal or congruent parts. Usually it involves a bisecting line, also called a bisector. The most often considered types of bisectors are the segment bisector, a line that passes through the midpoint of a given segment, and the angle bisector, a line that passes through the apex of an angle . In three-dimensional space, bisection is usually done by a bisecting plane, also called the bisector.
In geometry, an altitude of a triangle is a line segment through a vertex and perpendicular to a line containing the side opposite the vertex. This line containing the opposite side is called the extended base of the altitude. The intersection of the extended base and the altitude is called the foot of the altitude. The length of the altitude, often simply called "the altitude", is the distance between the extended base and the vertex. The process of drawing the altitude from the vertex to the foot is known as dropping the altitude at that vertex. It is a special case of orthogonal projection.
In geometry, an equilateral triangle is a triangle in which all three sides have the same length. In the familiar Euclidean geometry, an equilateral triangle is also equiangular; that is, all three internal angles are also congruent to each other and are each 60°. It is also a regular polygon, so it is also referred to as a regular triangle.
In mathematics and physics, the centroid, also known as geometric center or center of figure, of a plane figure or solid figure is the arithmetic mean position of all the points in the surface of the figure. The same definition extends to any object in -dimensional Euclidean space.
In Euclidean geometry, a cyclic quadrilateral or inscribed quadrilateral is a quadrilateral whose vertices all lie on a single circle. This circle is called the circumcircle or circumscribed circle, and the vertices are said to be concyclic. The center of the circle and its radius are called the circumcenter and the circumradius respectively. Other names for these quadrilaterals are concyclic quadrilateral and chordal quadrilateral, the latter since the sides of the quadrilateral are chords of the circumcircle. Usually the quadrilateral is assumed to be convex, but there are also crossed cyclic quadrilaterals. The formulas and properties given below are valid in the convex case.
In mathematics, a cubic plane curve is a plane algebraic curve C defined by a cubic equation
In geometry, a barycentric coordinate system is a coordinate system in which the location of a point is specified by reference to a simplex. The barycentric coordinates of a point can be interpreted as masses placed at the vertices of the simplex, such that the point is the center of mass of these masses. These masses can be zero or negative; they are all positive if and only if the point is inside the simplex.
In geometry, a median of a triangle is a line segment joining a vertex to the midpoint of the opposite side, thus bisecting that side. Every triangle has exactly three medians, one from each vertex, and they all intersect each other at the triangle's centroid. In the case of isosceles and equilateral triangles, a median bisects any angle at a vertex whose two adjacent sides are equal in length. The concept of a median extends to tetrahedra.
In geometry, the angle bisector theorem is concerned with the relative lengths of the two segments that a triangle's side is divided into by a line that bisects the opposite angle. It equates their relative lengths to the relative lengths of the other two sides of the triangle.
In Euclidean geometry, the Fermat point of a triangle, also called the Torricelli point or Fermat–Torricelli point, is a point such that the sum of the three distances from each of the three vertices of the triangle to the point is the smallest possible or, equivalently, the geometric median of the three vertices. It is so named because this problem was first raised by Fermat in a private letter to Evangelista Torricelli, who solved it.
In geometry, Routh's theorem determines the ratio of areas between a given triangle and a triangle formed by the pairwise intersections of three cevians. The theorem states that if in triangle points , , and lie on segments , , and , then writing , , and , the signed area of the triangle formed by the cevians , , and is
In geometry, Stewart's theorem yields a relation between the lengths of the sides and the length of a cevian in a triangle. Its name is in honour of the Scottish mathematician Matthew Stewart, who published the theorem in 1746.
In geometry, a cevian is a line segment which joins a vertex of a triangle to a point on the opposite side of the triangle. Medians and angle bisectors are special cases of cevians. The name "cevian" comes from the Italian mathematician Giovanni Ceva, who proved a well-known theorem about cevians which also bears his name.
In Euclidean geometry, Varignon's theorem holds that the midpoints of the sides of an arbitrary quadrilateral form a parallelogram, called the Varignon parallelogram. It is named after Pierre Varignon, whose proof was published posthumously in 1731.
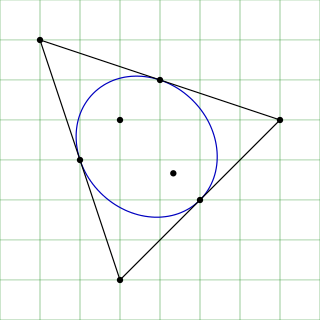
In geometry, the Steiner inellipse, midpoint inellipse, or midpoint ellipse of a triangle is the unique ellipse inscribed in the triangle and tangent to the sides at their midpoints. It is an example of an inellipse. By comparison the inscribed circle and Mandart inellipse of a triangle are other inconics that are tangent to the sides, but not at the midpoints unless the triangle is equilateral. The Steiner inellipse is attributed by Dörrie to Jakob Steiner, and a proof of its uniqueness is given by Dan Kalman.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.