Definition
Problem statement and basics
Similar to the one-dimensional case, an asterisk is used to represent the convolution operation. The number of dimensions in the given operation is reflected in the number of asterisks. For example, an M-dimensional convolution would be written with M asterisks. The following represents a M-dimensional convolution of discrete signals:

For discrete-valued signals, this convolution can be directly computed via the following:

The resulting output region of support of a discrete multidimensional convolution will be determined based on the size and regions of support of the two input signals.

Listed are several properties of the two-dimensional convolution operator. Note that these can also be extended for signals of -dimensions.

Commutative Property:

Associate Property:

Distributive Property:

These properties are seen in use in the figure below. Given some input that goes into a filter with impulse response and then another filter with impulse response , the output is given by . Assume that the output of the first filter is given by , this means that:






Further, that intermediate function is then convolved with the impulse response of the second filter, and thus the output can be represented by:

Using the associative property, this can be rewritten as follows:

meaning that the equivalent impulse response for a cascaded system is given by:


A similar analysis can be done on a set of parallel systems illustrated below.

In this case, it is clear that:

Using the distributive law, it is demonstrated that:

This means that in the case of a parallel system, the equivalent impulse response is provided by:

The equivalent impulse responses in both cascaded systems and parallel systems can be generalized to systems with -number of filters. [1]
Motivation and applications
Convolution in one dimension was a powerful discovery that allowed the input and output of a linear shift-invariant (LSI) system (see LTI system theory) to be easily compared so long as the impulse response of the filter system was known. This notion carries over to multidimensional convolution as well, as simply knowing the impulse response of a multidimensional filter too allows for a direct comparison to be made between the input and output of a system. This is profound since several of the signals that are transferred in the digital world today are of multiple dimensions including images and videos. Similar to the one-dimensional convolution, the multidimensional convolution allows the computation of the output of an LSI system for a given input signal.
For example, consider an image that is sent over some wireless network subject to electro-optical noise. Possible noise sources include errors in channel transmission, the analog to digital converter, and the image sensor. Usually noise caused by the channel or sensor creates spatially-independent, high-frequency signal components that translates to arbitrary light and dark spots on the actual image. In order to rid the image data of the high-frequency spectral content, it can be multiplied by the frequency response of a low-pass filter, which based on the convolution theorem, is equivalent to convolving the signal in the time/spatial domain by the impulse response of the low-pass filter. Several impulse responses that do so are shown below. [2]

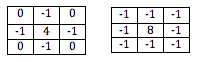
In addition to filtering out spectral content, the multidimensional convolution can implement edge detection and smoothing. This once again is wholly dependent on the values of the impulse response that is used to convolve with the input image. Typical impulse responses for edge detection are illustrated below.

In addition to image processing, multidimensional convolution can be implemented to enable a variety of other applications. Since filters are widespread in digital communication systems, any system that must transmit multidimensional data is assisted by filtering techniques It is used in real-time video processing, neural network analysis, digital geophysical data analysis, and much more. [3]
One typical distortion that occurs during image and video capture or transmission applications is blur that is caused by a low-pass filtering process. The introduced blur can be modeled using Gaussian low-pass filtering.











































































































































