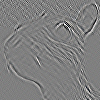
// author : csblo// Work made just by consulting :// https://en.wikipedia.org/wiki/Kernel_(image_processing)// Define kernels#define identity mat3(0, 0, 0, 0, 1, 0, 0, 0, 0)#define edge0 mat3(1, 0, -1, 0, 0, 0, -1, 0, 1)#define edge1 mat3(0, 1, 0, 1, -4, 1, 0, 1, 0)#define edge2 mat3(-1, -1, -1, -1, 8, -1, -1, -1, -1)#define sharpen mat3(0, -1, 0, -1, 5, -1, 0, -1, 0)#define box_blur mat3(1, 1, 1, 1, 1, 1, 1, 1, 1) * 0.1111#define gaussian_blur mat3(1, 2, 1, 2, 4, 2, 1, 2, 1) * 0.0625#define emboss mat3(-2, -1, 0, -1, 1, 1, 0, 1, 2)// Find coordinate of matrix element from indexvec2kpos(intindex){returnvec2[9](vec2(-1,-1),vec2(0,-1),vec2(1,-1),vec2(-1,0),vec2(0,0),vec2(1,0),vec2(-1,1),vec2(0,1),vec2(1,1))[index]/iResolution.xy;}// Extract region of dimension 3x3 from sampler centered in uv// sampler : texture sampler// uv : current coordinates on sampler// return : an array of mat3, each index corresponding with a color channelmat3[3]region3x3(sampler2Dsampler,vec2uv){// Create each pixels for regionvec4[9]region;for(inti=0;i<9;i++)region[i]=texture(sampler,uv+kpos(i));// Create 3x3 region with 3 color channels (red, green, blue)mat3[3]mRegion;for(inti=0;i<3;i++)mRegion[i]=mat3(region[0][i],region[1][i],region[2][i],region[3][i],region[4][i],region[5][i],region[6][i],region[7][i],region[8][i]);returnmRegion;}// Convolve a texture with kernel// kernel : kernel used for convolution// sampler : texture sampler// uv : current coordinates on samplervec3convolution(mat3kernel,sampler2Dsampler,vec2uv){vec3fragment;// Extract a 3x3 region centered in uvmat3[3]region=region3x3(sampler,uv);// for each color channel of regionfor(inti=0;i<3;i++){// get region channelmat3rc=region[i];// component wise multiplication of kernel by region channelmat3c=matrixCompMult(kernel,rc);// add each component of matrixfloatr=c[0][0]+c[1][0]+c[2][0]+c[0][1]+c[1][1]+c[2][1]+c[0][2]+c[1][2]+c[2][2];// for fragment at channel i, set resultfragment[i]=r;}returnfragment;}voidmainImage(outvec4fragColor,invec2fragCoord){// Normalized pixel coordinates (from 0 to 1)vec2uv=fragCoord/iResolution.xy;// Convolve kernel with texturevec3col=convolution(emboss,iChannel0,uv);// Output to screenfragColor=vec4(col,1.0);}