An autonomous robot is a robot that acts without recourse to human control. The first autonomous robots were constructed by W. Grey Walter. Modern examples include self-driving vacuums and cars. Industrial robot arms that work on assembly lines inside factories may also be considered autonomous robots, though their autonomy is restricted due to a highly structured environment and their inability to locomote.
Information foraging is a theory that applies the ideas from optimal foraging theory to understand how human users search for information. The theory is based on the assumption that, when searching for information, humans use "built-in" foraging mechanisms that evolved to help our animal ancestors find food. Importantly, better understanding of human search behavior can improve the usability of websites or any other user interface.

Sexual differentiation is the process of development of the sex differences between males and females from an undifferentiated zygote. Sex determination is often distinct from sex differentiation, sex determination is the designation for the development stage towards either male or female while sex differentiation is the pathway towards the development of the phenotype.

In cognitive psychology and neuroscience, spatial memory is a form of memory responsible for the recording and recovery of information needed to plan a course to a location and to recall the location of an object or the occurrence of an event. Spatial memory is necessary for orientation in space. Spatial memory can also be divided into egocentric and allocentric spatial memory. A person's spatial memory is required to navigate around a familiar city. A rat's spatial memory is needed to learn the location of food at the end of a maze. In both humans and animals, spatial memories are summarized as a cognitive map.

Leucorchestris arenicola, commonly called the dancing white lady spider, is a huntsman spider in the family Sparassidae and genus Leucorchestris. It is commonly found in the Namib desert of Namibia. It is often mistaken with the similarly named Carparachne aureoflava, or more commonly known as the wheel spider from the same location. L. arenicola relies on seismic vibrations, called drumming, for communication. It taps its foremost legs on the sand to send messages to other white lady spiders. Male L. arenicola will travel over 50 m in one night searching for a mate. If they find a mate, they must be extremely careful, for drumming the wrong message can be deadly. One of the major features that characterizes its nocturnal behavior is its specialized vision, using eight eyes in different orientations to capture a panoramic view of the surroundings. L. arenicola spiders use temporal summation in order to be able to see dim lighting during night-time wanderings. The species was first described by Reginald Frederick Lawrence in 1962, who described all the species in the genus Leucorchestris.
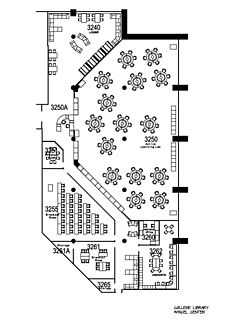
Wayfinding encompasses all of the ways in which people orient themselves in physical space and navigate from place to place.

A decentralised system in systems theory is a system in which lower level components operate on local information to accomplish global goals. The global pattern of behaviour is an emergent property of dynamical mechanisms that act upon local components, such as indirect communication, rather than the result of a central ordering influence of a centralised system.

A mobile robot, is a robot that is capable of moving in the surrounding (locomotion). Mobile robotics is usually considered to be a subfield of robotics and information engineering.
Embodied cognitive science is an interdisciplinary field of research, the aim of which is to explain the mechanisms underlying intelligent behavior. It comprises three main methodologies: the modeling of psychological and biological systems in a holistic manner that considers the mind and body as a single entity; the formation of a common set of general principles of intelligent behavior; and the experimental use of robotic agents in controlled environments.
Allothetic means being centred in people or places other than oneself. It has been defined as a process of "determining and maintaining a course or trajectory from one place to another. It can be used as a navigational strategy among animals to aid in their survival. It can also be a source of information for machines, particularly those biologically-inspired models and is provided by a set of laser rangefinders, sonars, or vision.

The retrosplenial cortex (RSC) is a cortical area in the brain comprising Brodmann areas 29 and 30. It is secondary association cortex, making connections with numerous other brain regions. The region's name refers to its anatomical location immediately behind the splenium of the corpus callosum in primates, although in rodents it is located more towards the brain surface and is relatively larger. Its function is currently not well understood, but its location close to visual areas and also to the hippocampal spatial/memory system suggest it may have a role in mediating between perceptual and memory functions, particularly in the spatial domain. However, its exact contribution to either space or memory processing has been hard to pin down.
Neurorobotics, a combined study of neuroscience, robotics, and artificial intelligence, is the science and technology of embodied autonomous neural systems. Neural systems include brain-inspired algorithms, computational models of biological neural networks and actual biological systems. Such neural systems can be embodied in machines with mechanic or any other forms of physical actuation. This includes robots, prosthetic or wearable systems but also, at smaller scale, micro-machines and, at the larger scales, furniture and infrastructures.

Robot localization denotes the robot's ability to establish its own position and orientation within the frame of reference. Path planning is effectively an extension of localisation, in that it requires the determination of the robot's current position and a position of a goal location, both within the same frame of reference or coordinates. Map building can be in the shape of a metric map or any notation describing locations in the robot frame of reference.

Tandem running is a social learning phenomenon seen mostly in ants, by which one ant leads another native ant from the nest to the food source it has found. Tandem running is also used to find and choose better, new nest sites to which the colony can emigrate. The follower ant maintains contact with the lead ant by frequently touching the leader's legs and abdomen with its antennae. As predators, scavengers, and herbivores, ants have a variety of food sources, for which they may journey as far as 200 meters from their nest, spraying a scent trail as they go. To lead their kin to new food sources, ants demonstrate one of the few examples of interactive teaching outside of the mammalian class. Social learning by teaching requires that the naive observer change its behavior and acquire some skills or knowledge faster than it would have independently and that the teacher incur some cost. In order for the follower ant to learn landmarks, the leader must travel much slower and make frequent stops to check for his follower. Ultimately, the knowledge of the route to the new food source can be passed throughout the colony as one follower becomes a leader, making tandem running an effective time-saving practice.
In computing, 3D interaction is a form of human-machine interaction where users are able to move and perform interaction in 3D space. Both human and machine process information where the physical position of elements in the 3D space is relevant.
Spatial cognition is concerned with the acquisition, organization, utilization, and revision of knowledge about spatial environments. These capabilities enable individuals to manage basic and high-level cognitive tasks in everyday life. Numerous disciplines work together to understand spatial cognition in different species, especially in humans. Thereby, spatial cognition studies also have helped to link cognitive psychology and neuroscience. Scientists in both fields work together to figure out what role spatial cognition plays in the brain as well as to determine the surrounding neurobiological infrastructure.
The Learning Applied to Ground Vehicles (LAGR) program, which ran from 2004 until 2008, had the goal of accelerating progress in autonomous, perception-based, off-road navigation in robotic unmanned ground vehicles (UGVs). LAGR was funded by DARPA, a research agency of the United States Department of Defense.

Animal navigation is the ability of many animals to find their way accurately without maps or instruments. Birds such as the Arctic tern, insects such as the monarch butterfly and fish such as the salmon regularly migrate thousands of miles to and from their breeding grounds, and many other species navigate effectively over shorter distances.
Social navigation is a form of social computing introduced by Paul Dourish and Matthew Chalmers in 1994. They define it as when "movement from one item to another is provoked as an artifact of the activity of another or a group of others." According to later research in 2002, "social navigation exploits the knowledge and experience of peer users of information resources" to guide users in the information space. With all the digital information available both from the World Wide Web and other sources, it is becoming increasingly difficult to navigate and search efficiently. Studying others' navigational trails and understanding their behavior can help improve one's own search strategy by helping them to make more informed decisions based on the actions of others. "The idea of social navigation is to aid users to navigate information spaces through making the collective, aggregated, or individual actions of others visible and useful as a basis for making decisions on where to go next and what to choose."

The Cincinnati Water Maze (CWM) is a type of water maze. Water mazes are experimental equipment used in laboratories; they are mazes that are partially filled with water, and rodents are put in them to be observed and timed as they make their way through the maze. Generally two sets of rodents are put through the maze, one that has been treated, and another that has not, and the results are compared. The experimenter uses this type of maze to learn about the subject's cognitive or emotional processes.