Related Research Articles

Euclidean space is the fundamental space of geometry, intended to represent physical space. Originally, that is, in Euclid's Elements, it was the three-dimensional space of Euclidean geometry, but in modern mathematics there are Euclidean spaces of any positive integer dimension n, which are called Euclidean n-spaces when one wants to specify their dimension. For n equal to one or two, they are commonly called respectively Euclidean lines and Euclidean planes. The qualifier "Euclidean" is used to distinguish Euclidean spaces from other spaces that were later considered in physics and modern mathematics.
In geometry, a geodesic is a curve representing in some sense the shortest path (arc) between two points in a surface, or more generally in a Riemannian manifold. The term also has meaning in any differentiable manifold with a connection. It is a generalization of the notion of a "straight line".

In mathematical physics, Minkowski space combines inertial space and time manifolds (x,y) with a non-inertial reference frame of space and time (x',t') into a four-dimensional model relating a position to the field (physics). A four-vector (x,y,z,t) consists of a coordinate axes such as a Euclidean space plus time. This may be used with the non-inertial frame to illustrate specifics of motion, but should not be confused with the spacetime model generally.
In the mathematical field of Riemannian geometry, the scalar curvature is a measure of the curvature of a Riemannian manifold. To each point on a Riemannian manifold, it assigns a single real number determined by the geometry of the metric near that point. It is defined by a complicated explicit formula in terms of partial derivatives of the metric components, although it is also characterized by the volume of infinitesimally small geodesic balls. In the context of the differential geometry of surfaces, the scalar curvature is twice the Gaussian curvature, and completely characterizes the curvature of a surface. In higher dimensions, however, the scalar curvature only represents one particular part of the Riemann curvature tensor.

In differential geometry, a pseudo-Riemannian manifold, also called a semi-Riemannian manifold, is a differentiable manifold with a metric tensor that is everywhere nondegenerate. This is a generalization of a Riemannian manifold in which the requirement of positive-definiteness is relaxed.
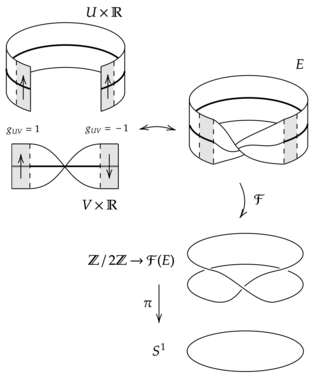
In mathematics, a frame bundle is a principal fiber bundle F(E) associated to any vector bundle E. The fiber of F(E) over a point x is the set of all ordered bases, or frames, for Ex. The general linear group acts naturally on F(E) via a change of basis, giving the frame bundle the structure of a principal GL(k, R)-bundle (where k is the rank of E).

In mathematics, a moving frame is a flexible generalization of the notion of an ordered basis of a vector space often used to study the extrinsic differential geometry of smooth manifolds embedded in a homogeneous space.
In mathematics, and specifically differential geometry, a connection form is a manner of organizing the data of a connection using the language of moving frames and differential forms.
Teleparallelism, was an attempt by Albert Einstein to base a unified theory of electromagnetism and gravity on the mathematical structure of distant parallelism, also referred to as absolute or teleparallelism. In this theory, a spacetime is characterized by a curvature-free linear connection in conjunction with a metric tensor field, both defined in terms of a dynamical tetrad field.
In mathematics and physics, the Christoffel symbols are an array of numbers describing a metric connection. The metric connection is a specialization of the affine connection to surfaces or other manifolds endowed with a metric, allowing distances to be measured on that surface. In differential geometry, an affine connection can be defined without reference to a metric, and many additional concepts follow: parallel transport, covariant derivatives, geodesics, etc. also do not require the concept of a metric. However, when a metric is available, these concepts can be directly tied to the "shape" of the manifold itself; that shape is determined by how the tangent space is attached to the cotangent space by the metric tensor. Abstractly, one would say that the manifold has an associated (orthonormal) frame bundle, with each "frame" being a possible choice of a coordinate frame. An invariant metric implies that the structure group of the frame bundle is the orthogonal group O(p, q). As a result, such a manifold is necessarily a (pseudo-)Riemannian manifold. The Christoffel symbols provide a concrete representation of the connection of (pseudo-)Riemannian geometry in terms of coordinates on the manifold. Additional concepts, such as parallel transport, geodesics, etc. can then be expressed in terms of Christoffel symbols.
When studying and formulating Albert Einstein's theory of general relativity, various mathematical structures and techniques are utilized. The main tools used in this geometrical theory of gravitation are tensor fields defined on a Lorentzian manifold representing spacetime. This article is a general description of the mathematics of general relativity.
In general relativity, the metric tensor is the fundamental object of study. The metric captures all the geometric and causal structure of spacetime, being used to define notions such as time, distance, volume, curvature, angle, and separation of the future and the past.
A frame field in general relativity is a set of four pointwise-orthonormal vector fields, one timelike and three spacelike, defined on a Lorentzian manifold that is physically interpreted as a model of spacetime. The timelike unit vector field is often denoted by and the three spacelike unit vector fields by . All tensorial quantities defined on the manifold can be expressed using the frame field and its dual coframe field.
In mathematics, and more specifically in differential geometry, a Hermitian manifold is the complex analogue of a Riemannian manifold. More precisely, a Hermitian manifold is a complex manifold with a smoothly varying Hermitian inner product on each (holomorphic) tangent space. One can also define a Hermitian manifold as a real manifold with a Riemannian metric that preserves a complex structure.
In mathematics, a metric connection is a connection in a vector bundle E equipped with a bundle metric; that is, a metric for which the inner product of any two vectors will remain the same when those vectors are parallel transported along any curve. This is equivalent to:
In differential geometry, normal coordinates at a point p in a differentiable manifold equipped with a symmetric affine connection are a local coordinate system in a neighborhood of p obtained by applying the exponential map to the tangent space at p. In a normal coordinate system, the Christoffel symbols of the connection vanish at the point p, thus often simplifying local calculations. In normal coordinates associated to the Levi-Civita connection of a Riemannian manifold, one can additionally arrange that the metric tensor is the Kronecker delta at the point p, and that the first partial derivatives of the metric at p vanish.
In mathematics, a Clifford bundle is an algebra bundle whose fibers have the structure of a Clifford algebra and whose local trivializations respect the algebra structure. There is a natural Clifford bundle associated to any (pseudo) Riemannian manifold M which is called the Clifford bundle of M.
In mathematics, more precisely in differential geometry, a soldering of a fiber bundle to a smooth manifold is a manner of attaching the fibers to the manifold in such a way that they can be regarded as tangent. Intuitively, soldering expresses in abstract terms the idea that a manifold may have a point of contact with a certain model Klein geometry at each point. In extrinsic differential geometry, the soldering is simply expressed by the tangency of the model space to the manifold. In intrinsic geometry, other techniques are needed to express it. Soldering was introduced in this general form by Charles Ehresmann in 1950.
The tetrad formalism is an approach to general relativity that generalizes the choice of basis for the tangent bundle from a coordinate basis to the less restrictive choice of a local basis, i.e. a locally defined set of four linearly independent vector fields called a tetrad or vierbein. It is a special case of the more general idea of a vielbein formalism, which is set in (pseudo-)Riemannian geometry. This article as currently written makes frequent mention of general relativity; however, almost everything it says is equally applicable to (pseudo-)Riemannian manifolds in general, and even to spin manifolds. Most statements hold simply by substituting arbitrary for . In German, "vier" translates to "four", and "viel" to "many".
In mathematics and mathematical physics, a coordinate basis or holonomic basis for a differentiable manifold M is a set of basis vector fields {e1, ..., en} defined at every point P of a region of the manifold as
References
- ↑ Lee, John (2013), Introduction to Smooth Manifolds, Graduate Texts in Mathematics, vol. 218 (2nd ed.), Springer, p. 178, ISBN 9781441999825 .
| | This relativity-related article is a stub. You can help Wikipedia by expanding it. |
| | This Riemannian geometry-related article is a stub. You can help Wikipedia by expanding it. |