Related Research Articles
In graph theory, a planar graph is a graph that can be embedded in the plane, i.e., it can be drawn on the plane in such a way that its edges intersect only at their endpoints. In other words, it can be drawn in such a way that no edges cross each other. Such a drawing is called a plane graph or planar embedding of the graph. A plane graph can be defined as a planar graph with a mapping from every node to a point on a plane, and from every edge to a plane curve on that plane, such that the extreme points of each curve are the points mapped from its end nodes, and all curves are disjoint except on their extreme points.

In computer science, the clique problem is the computational problem of finding cliques in a graph. It has several different formulations depending on which cliques, and what information about the cliques, should be found. Common formulations of the clique problem include finding a maximum clique, finding a maximum weight clique in a weighted graph, listing all maximal cliques, and solving the decision problem of testing whether a graph contains a clique larger than a given size.

In graph theory, an independent set, stable set, coclique or anticlique is a set of vertices in a graph, no two of which are adjacent. That is, it is a set of vertices such that for every two vertices in , there is no edge connecting the two. Equivalently, each edge in the graph has at most one endpoint in . A set is independent if and only if it is a clique in the graph's complement. The size of an independent set is the number of vertices it contains. Independent sets have also been called "internally stable sets", of which "stable set" is a shortening.
In the mathematical discipline of graph theory, a matching or independent edge set in an undirected graph is a set of edges without common vertices. In other words, a subset of the edges is a matching if each vertex appears in at most one edge of that matching. Finding a matching in a bipartite graph can be treated as a network flow problem.

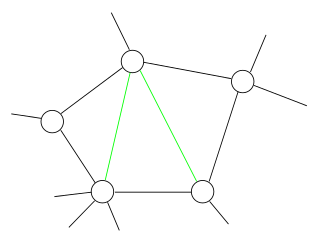
In graph theory, a proper edge coloring of a graph is an assignment of "colors" to the edges of the graph so that no two incident edges have the same color. For example, the figure to the right shows an edge coloring of a graph by the colors red, blue, and green. Edge colorings are one of several different types of graph coloring. The edge-coloring problem asks whether it is possible to color the edges of a given graph using at most k different colors, for a given value of k, or with the fewest possible colors. The minimum required number of colors for the edges of a given graph is called the chromatic index of the graph. For example, the edges of the graph in the illustration can be colored by three colors but cannot be colored by two colors, so the graph shown has chromatic index three.
In the mathematical area of graph theory, a chordal graph is one in which all cycles of four or more vertices have a chord, which is an edge that is not part of the cycle but connects two vertices of the cycle. Equivalently, every induced cycle in the graph should have exactly three vertices. The chordal graphs may also be characterized as the graphs that have perfect elimination orderings, as the graphs in which each minimal separator is a clique, and as the intersection graphs of subtrees of a tree. They are sometimes also called rigid circuit graphs or triangulated graphs.

In graph theory, a branch of mathematics, the circuit rank, cyclomatic number, cycle rank, or nullity of an undirected graph is the minimum number of edges that must be removed from the graph to break all its cycles, making it into a tree or forest. It is equal to the number of independent cycles in the graph. Unlike the corresponding feedback arc set problem for directed graphs, the circuit rank r is easily computed using the formula

In graph theory and graph algorithms, a feedback arc set or feedback edge set in a directed graph is a subset of the edges of the graph that contains at least one edge out of every cycle in the graph. Removing these edges from the graph breaks all of the cycles, producing an acyclic subgraph of the given graph, often called a directed acyclic graph. A feedback arc set with the fewest possible edges is a minimum feedback arc set and its removal leaves a maximum acyclic subgraph; weighted versions of these optimization problems are also used. If a feedback arc set is minimal, meaning that removing any edge from it produces a subset that is not a feedback arc set, then it has an additional property: reversing all of its edges, rather than removing them, produces a directed acyclic graph.
In graph theory, reachability refers to the ability to get from one vertex to another within a graph. A vertex can reach a vertex if there exists a sequence of adjacent vertices which starts with and ends with .
In graph theory, a path decomposition of a graph G is, informally, a representation of G as a "thickened" path graph, and the pathwidth of G is a number that measures how much the path was thickened to form G. More formally, a path-decomposition is a sequence of subsets of vertices of G such that the endpoints of each edge appear in one of the subsets and such that each vertex appears in a contiguous subsequence of the subsets, and the pathwidth is one less than the size of the largest set in such a decomposition. Pathwidth is also known as interval thickness, vertex separation number, or node searching number.
In computer science, the Hopcroft–Karp algorithm is an algorithm that takes a bipartite graph as input and produces a maximum-cardinality matching as output — a set of as many edges as possible with the property that no two edges share an endpoint. It runs in time in the worst case, where is set of edges in the graph, is set of vertices of the graph, and it is assumed that . In the case of dense graphs the time bound becomes , and for sparse random graphs it runs in time with high probability.
Maximum cardinality matching is a fundamental problem in graph theory. We are given a graph G, and the goal is to find a matching containing as many edges as possible; that is, a maximum cardinality subset of the edges such that each vertex is adjacent to at most one edge of the subset. As each edge will cover exactly two vertices, this problem is equivalent to the task of finding a matching that covers as many vertices as possible.

In graph theory, a branch of mathematics, the triconnected components of a biconnected graph are a system of smaller graphs that describe all of the 2-vertex cuts in the graph. An SPQR tree is a tree data structure used in computer science, and more specifically graph algorithms, to represent the triconnected components of a graph. The SPQR tree of a graph may be constructed in linear time and has several applications in dynamic graph algorithms and graph drawing.
Planarity is a 2005 puzzle computer game by John Tantalo, based on a concept by Mary Radcliffe at Western Michigan University. The name comes from the concept of planar graphs in graph theory; these are graphs that can be embedded in the Euclidean plane so that no edges intersect. By Fáry's theorem, if a graph is planar, it can be drawn without crossings so that all of its edges are straight line segments. In the planarity game, the player is presented with a circular layout of a planar graph, with all the vertices placed on a single circle and with many crossings. The goal for the player is to eliminate all of the crossings and construct a straight-line embedding of the graph by moving the vertices one by one into better positions.
In graph theory, the planarity testing problem is the algorithmic problem of testing whether a given graph is a planar graph (that is, whether it can be drawn in the plane without edge intersections). This is a well-studied problem in computer science for which many practical algorithms have emerged, many taking advantage of novel data structures. Most of these methods operate in O(n) time (linear time), where n is the number of edges (or vertices) in the graph, which is asymptotically optimal. Rather than just being a single Boolean value, the output of a planarity testing algorithm may be a planar graph embedding, if the graph is planar, or an obstacle to planarity such as a Kuratowski subgraph if it is not.
In graph theory, the planar separator theorem is a form of isoperimetric inequality for planar graphs, that states that any planar graph can be split into smaller pieces by removing a small number of vertices. Specifically, the removal of vertices from an n-vertex graph can partition the graph into disjoint subgraphs each of which has at most vertices.

In computational complexity theory, a problem is NP-complete when:
- It is a decision problem, meaning that for any input to the problem, the output is either "yes" or "no".
- When the answer is "yes", this can be demonstrated through the existence of a short solution.
- The correctness of each solution can be verified quickly and a brute-force search algorithm can find a solution by trying all possible solutions.
- The problem can be used to simulate every other problem for which we can verify quickly that a solution is correct. In this sense, NP-complete problems are the hardest of the problems to which solutions can be verified quickly. If we could find solutions of some NP-complete problem quickly, we could quickly find the solutions of every other problem to which a given solution can be easily verified.
In the study of graph algorithms, an implicit graph representation is a graph whose vertices or edges are not represented as explicit objects in a computer's memory, but rather are determined algorithmically from some other input, for example a computable function.
In graph theory, a bipolar orientation or st-orientation of an undirected graph is an assignment of a direction to each edge that causes the graph to become a directed acyclic graph with a single source s and a single sink t, and an st-numbering of the graph is a topological ordering of the resulting directed acyclic graph.
References
- ↑ J. Hopcroft, W. Paul and L. Valiant, On Time versus space, Journal of the Association for Computing Machinery 1977
- ↑ Richard J. Lipton and Robert E. Tarjan, Applications of a Planar Separator Theorem, SIAM J. Comput. 1980
- ↑ Noga Alon, Paul Seymour, Robin Thomas, A Separator Theorem for Graphs with an Excluded Minor and its Applications, ACM, 1990.
- ↑ Stephen Cook; Ravi Sethi (1976). "Storage requirements for deterministic polynomial time recognizable languages". Journal of Computer and System Sciences . 13 (1): 25–37. doi: 10.1016/S0022-0000(76)80048-7 .
- ↑ Takumi Kasai; Akeo Adachi; Shigeki Iwata (1979). "Classes of pebble games and complete problems". SIAM Journal on Computing . 8 (4): 574–586. doi:10.1137/0208046.
- ↑ Straubing, Howard (1994). Finite automata, formal logic, and circuit complexity . Progress in Theoretical Computer Science. Basel: Birkhäuser. pp. 39–44. ISBN 3-7643-3719-2. Zbl 0816.68086.