Related Research Articles
In graph theory, an expander graph is a sparse graph that has strong connectivity properties, quantified using vertex, edge or spectral expansion. Expander constructions have spawned research in pure and applied mathematics, with several applications to complexity theory, design of robust computer networks, and the theory of error-correcting codes.

In mathematics, particularly graph theory, and computer science, a directed acyclic graph (DAG) is a directed graph with no directed cycles. That is, it consists of vertices and edges, with each edge directed from one vertex to another, such that following those directions will never form a closed loop. A directed graph is a DAG if and only if it can be topologically ordered, by arranging the vertices as a linear ordering that is consistent with all edge directions. DAGs have numerous scientific and computational applications, ranging from biology to information science to computation (scheduling).

In the mathematical field of graph theory, a bipartite graph is a graph whose vertices can be divided into two disjoint and independent sets and , that is, every edge connects a vertex in to one in . Vertex sets and are usually called the parts of the graph. Equivalently, a bipartite graph is a graph that does not contain any odd-length cycles.

In computer science, the clique problem is the computational problem of finding cliques in a graph. It has several different formulations depending on which cliques, and what information about the cliques, should be found. Common formulations of the clique problem include finding a maximum clique, finding a maximum weight clique in a weighted graph, listing all maximal cliques, and solving the decision problem of testing whether a graph contains a clique larger than a given size.

In the mathematical field of graph theory, a spanning treeT of an undirected graph G is a subgraph that is a tree which includes all of the vertices of G. In general, a graph may have several spanning trees, but a graph that is not connected will not contain a spanning tree. If all of the edges of G are also edges of a spanning tree T of G, then G is a tree and is identical to T.
In computer science, a graph is an abstract data type that is meant to implement the undirected graph and directed graph concepts from the field of graph theory within mathematics.
In the mathematical discipline of graph theory, a matching or independent edge set in an undirected graph is a set of edges without common vertices. In other words, a subset of the edges is a matching if each vertex appears in at most one edge of that matching. Finding a matching in a bipartite graph can be treated as a network flow problem.
In the mathematical discipline of graph theory, the line graph of an undirected graph G is another graph L(G) that represents the adjacencies between edges of G. L(G) is constructed in the following way: for each edge in G, make a vertex in L(G); for every two edges in G that have a vertex in common, make an edge between their corresponding vertices in L(G).

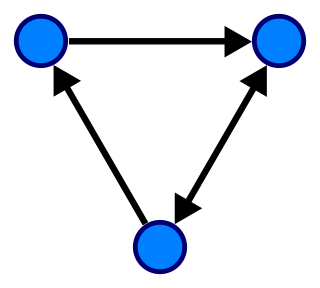
In graph theory and graph algorithms, a feedback arc set or feedback edge set in a directed graph is a subset of the edges of the graph that contains at least one edge out of every cycle in the graph. Removing these edges from the graph breaks all of the cycles, producing a directed acyclic graph, an acyclic subgraph of the given graph. The feedback arc set with the fewest possible edges is the minimum feedback arc set and its removal leaves the maximum acyclic subgraph; weighted versions of these optimization problems are also used. If a feedback arc set is minimal, meaning that removing any edge from it produces a subset that is not a feedback arc set, then it has an additional property: reversing all of its edges, rather than removing them, produces a directed acyclic graph.

In the mathematical discipline of graph theory, the dual graph of a planar graph G is a graph that has a vertex for each face of G. The dual graph has an edge for each pair of faces in G that are separated from each other by an edge, and a self-loop when the same face appears on both sides of an edge. Thus, each edge e of G has a corresponding dual edge, whose endpoints are the dual vertices corresponding to the faces on either side of e. The definition of the dual depends on the choice of embedding of the graph G, so it is a property of plane graphs rather than planar graphs. For planar graphs generally, there may be multiple dual graphs, depending on the choice of planar embedding of the graph.
In computer science, graph traversal refers to the process of visiting each vertex in a graph. Such traversals are classified by the order in which the vertices are visited. Tree traversal is a special case of graph traversal.
In graph theory, a connected graph G is said to be k-vertex-connected if it has more than k vertices and remains connected whenever fewer than k vertices are removed.
Retiming is the technique of moving the structural location of latches or registers in a digital circuit to improve its performance, area, and/or power characteristics in such a way that preserves its functional behavior at its outputs. Retiming was first described by Charles E. Leiserson and James B. Saxe in 1983.

In graph theory, a pseudoforest is an undirected graph in which every connected component has at most one cycle. That is, it is a system of vertices and edges connecting pairs of vertices, such that no two cycles of consecutive edges share any vertex with each other, nor can any two cycles be connected to each other by a path of consecutive edges. A pseudotree is a connected pseudoforest.
Dryad was a research project at Microsoft Research for a general purpose runtime for execution of data parallel applications. The research prototypes of the Dryad and DryadLINQ data-parallel processing frameworks are available in source form at GitHub.
In graph theory and combinatorial optimization, a closure of a directed graph is a set of vertices C, such that no edges leave C. The closure problem is the task of finding the maximum-weight or minimum-weight closure in a vertex-weighted directed graph. It may be solved in polynomial time using a reduction to the maximum flow problem. It may be used to model various application problems of choosing an optimal subset of tasks to perform, with dependencies between pairs of tasks, one example being in open pit mining.
In graph theory, the blossom algorithm is an algorithm for constructing maximum matchings on graphs. The algorithm was developed by Jack Edmonds in 1961, and published in 1965. Given a general graph G = (V, E), the algorithm finds a matching M such that each vertex in V is incident with at most one edge in M and |M| is maximized. The matching is constructed by iteratively improving an initial empty matching along augmenting paths in the graph. Unlike bipartite matching, the key new idea is that an odd-length cycle in the graph (blossom) is contracted to a single vertex, with the search continuing iteratively in the contracted graph.

In crystallography, a periodic graph or crystal net is a three-dimensional periodic graph, i.e., a three-dimensional Euclidean graph whose vertices or nodes are points in three-dimensional Euclidean space, and whose edges are line segments connecting pairs of vertices, periodic in three linearly independent axial directions. There is usually an implicit assumption that the set of vertices are uniformly discrete, i.e., that there is a fixed minimum distance between any two vertices. The vertices may represent positions of atoms or complexes or clusters of atoms such as single-metal ions, molecular building blocks, or secondary building units, while each edge represents a chemical bond or a polymeric ligand.
Process network synthesis (PNS) is a method to represent a process structure in a 'directed bipartite graph'. Process network synthesis uses the P-graph method to create a process structure. The scientific aim of this method is to find optimum structures.
The breadth-first-search algorithm is a way to explore the vertices of a graph layer by layer. It is a basic algorithm in graph theory which can be used as a part of other graph algorithms. For instance, BFS is used by Dinic's algorithm to find maximum flow in a graph. Moreover, BFS is also one of the kernel algorithms in Graph500 benchmark, which is a benchmark for data-intensive supercomputing problems. This article discusses the possibility of speeding up BFS through the use of parallel computing.
References
- ↑ Friedler, F.; Huang, Y.W.; Fan, L.T. (1992). "Combinatorial Algorithms for Process Synthesis". Computers Chemical Engineering. 16 (Suppl 1): 313–320. doi:10.1016/S0098-1354(09)80037-9.
- ↑ Friedler, F.; Varga, J. B.; Feher, E.; Fan, L. T. (1996). "Combinatorially Accelerated Branch-and-Bound Method for Solving the MIP Model of Process Network Synthesis". State of the Art in Global Optimization. Nonconvex Optimization and Its Applications. Vol. 7. Dordrecht: Kluwer Academic Publishers. pp. 609–626. doi:10.1007/978-1-4613-3437-8_35. ISBN 978-0-7923-4351-6.