
The Global Positioning System (GPS), originally Navstar GPS, is a satellite-based radio navigation system owned by the United States Space Force and operated by Mission Delta 31. It is one of the global navigation satellite systems (GNSS) that provide geolocation and time information to a GPS receiver anywhere on or near the Earth where there is an unobstructed line of sight to four or more GPS satellites. It does not require the user to transmit any data, and operates independently of any telephone or Internet reception, though these technologies can enhance the usefulness of the GPS positioning information. It provides critical positioning capabilities to military, civil, and commercial users around the world. Although the United States government created, controls and maintains the GPS system, it is freely accessible to anyone with a GPS receiver.

Celestial navigation, also known as astronavigation, is the practice of position fixing using stars and other celestial bodies that enables a navigator to accurately determine their actual current physical position in space or on the surface of the Earth without relying solely on estimated positional calculations, commonly known as dead reckoning. Celestial navigation is performed without using satellite navigation or other similar modern electronic or digital positioning means.
Time and frequency transfer is a scheme where multiple sites share a precise reference time or frequency. The technique is commonly used for creating and distributing standard time scales such as International Atomic Time (TAI). Time transfer solves problems such as astronomical observatories correlating observed flashes or other phenomena with each other, as well as cell phone towers coordinating handoffs as a phone moves from one cell to another.

A radio clock or radio-controlled clock (RCC), and often colloquially referred to as an "atomic clock", is a type of quartz clock or watch that is automatically synchronized to a time code transmitted by a radio transmitter connected to a time standard such as an atomic clock. Such a clock may be synchronized to the time sent by a single transmitter, such as many national or regional time transmitters, or may use the multiple transmitters used by satellite navigation systems such as Global Positioning System. Such systems may be used to automatically set clocks or for any purpose where accurate time is needed. Radio clocks may include any feature available for a clock, such as alarm function, display of ambient temperature and humidity, broadcast radio reception, etc.
True-range multilateration is a method to determine the location of a movable vehicle or stationary point in space using multiple ranges (distances) between the vehicle/point and multiple spatially-separated known locations. Energy waves may be involved in determining range, but are not required.
Receiver autonomous integrity monitoring (RAIM) is a technology developed to assess the integrity of individual signals collected and integrated by the receiver units employed in a Global Navigation Satellite System (GNSS). The integrity of received signals and resulting correctness and precision of derived receiver location are of special importance in safety-critical GNSS applications, such as in aviation or marine navigation.

Dilution of precision (DOP), or geometric dilution of precision (GDOP), is a term used in satellite navigation and geomatics engineering to specify the error propagation as a mathematical effect of navigation satellite geometry on positional measurement precision.

Satellite geodesy is geodesy by means of artificial satellites—the measurement of the form and dimensions of Earth, the location of objects on its surface and the figure of the Earth's gravity field by means of artificial satellite techniques. It belongs to the broader field of space geodesy. Traditional astronomical geodesy is not commonly considered a part of satellite geodesy, although there is considerable overlap between the techniques.

A satellite navigation or satnav system is a system that uses satellites to provide autonomous geopositioning. A satellite navigation system with global coverage is termed global navigation satellite system (GNSS). As of 2024, four global systems are operational: the United States's Global Positioning System (GPS), Russia's Global Navigation Satellite System (GLONASS), China's BeiDou Navigation Satellite System (BDS), and the European Union's Galileo.

Differential Global Positioning Systems (DGPSs) supplement and enhance the positional data available from global navigation satellite systems (GNSSs). A DGPS can increase accuracy of positional data by about a thousandfold, from approximately 15 metres (49 ft) to 1–3 centimetres.

Real-time kinematic positioning (RTK) is the application of surveying to correct for common errors in current satellite navigation (GNSS) systems. It uses measurements of the phase of the signal's carrier wave in addition to the information content of the signal and relies on a single reference station or interpolated virtual station to provide real-time corrections, providing up to centimetre-level accuracy. With reference to GPS in particular, the system is commonly referred to as carrier-phase enhancement, or CPGPS. It has applications in land surveying, hydrographic surveying, and in unmanned aerial vehicle navigation.
Pseudo-range multilateration, often simply multilateration (MLAT) when in context, is a technique for determining the position of an unknown point, such as a vehicle, based on measurement of biased times of flight (TOFs) of energy waves traveling between the vehicle and multiple stations at known locations. TOFs are biased by synchronization errors in the difference between times of arrival (TOA) and times of transmission (TOT): TOF=TOA-TOT. Pseudo-ranges (PRs) are TOFs multiplied by the wave propagation speed: PR=TOF ⋅ s. In general, the stations' clocks are assumed synchronized but the vehicle's clock is desynchronized.
A positioning system is a system for determining the position of an object in space. Positioning system technologies exist ranging from interplanetary coverage with meter accuracy to workspace and laboratory coverage with sub-millimeter accuracy. A major subclass is made of geopositioning systems, used for determining an object's position with respect to Earth, i.e., its geographical position; one of the most well-known and commonly used geopositioning systems is the Global Positioning System (GPS) and similar global navigation satellite systems (GNSS).

GPS signals are broadcast by Global Positioning System satellites to enable satellite navigation. Receivers on or near the Earth's surface can determine location, time, and velocity using this information. The GPS satellite constellation is operated by the 2nd Space Operations Squadron (2SOPS) of Space Delta 8, United States Space Force.
In the field of geodesy, Receiver Independent Exchange Format (RINEX) is a data interchange format for raw satellite navigation system data. This allows the user to post-process the received data to produce a more accurate result — usually with other data unknown to the original receiver, such as better models of the atmospheric conditions at time of measurement.
Satellite navigation solution for the receiver's position (geopositioning) involves an algorithm. In essence, a GNSS receiver measures the transmitting time of GNSS signals emitted from four or more GNSS satellites and these measurements are used to obtain its position and reception time.
The error analysis for the Global Positioning System is important for understanding how GPS works, and for knowing what magnitude of error should be expected. The GPS makes corrections for receiver clock errors and other effects but there are still residual errors which are not corrected. GPS receiver position is computed based on data received from the satellites. Errors depend on geometric dilution of precision and the sources listed in the table below.
GNSS enhancement refers to techniques used to improve the accuracy of positioning information provided by the Global Positioning System or other global navigation satellite systems in general, a network of satellites used for navigation. Enhancement methods of improving accuracy rely on external information being integrated into the calculation process. There are many such systems in place and they are generally named or described based on how the GPS sensor receives the information. Some systems transmit additional information about sources of error, others provide direct measurements of how much the signal was off in the past, while a third group provides additional navigational or vehicle information to be integrated into the calculation process.
Locata Corporation is a privately held technology company headquartered in Canberra, Australia, with a fully owned subsidiary in Las Vegas, Nevada. Locata has invented a local positioning system that can either replace or augment Global Positioning System (GPS) signals when they are blocked, jammed or unreliable. Government, commercial and other organizations use Locata to determine accurate positioning as a local backup to GPS.
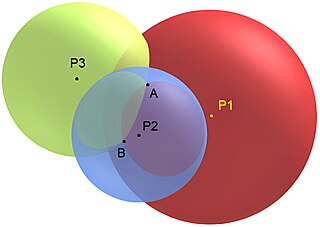
Trilateration is the use of distances for determining the unknown position coordinates of a point of interest, often around Earth (geopositioning). When more than three distances are involved, it may be called multilateration, for emphasis.

