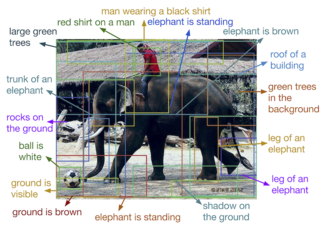
Computer vision is an interdisciplinary scientific field that deals with how computers can gain high-level understanding from digital images or videos. From the perspective of engineering, it seeks to understand and automate tasks that the human visual system can do.

Forward-looking infrared (FLIR) cameras, typically used on military and civilian aircraft, use a thermographic camera that senses infrared radiation.

The visual system comprises the sensory organ and parts of the central nervous system which gives organisms the sense of sight as well as enabling the formation of several non-image photo response functions. It detects and interprets information from the optical spectrum perceptible to that species to "build a representation" of the surrounding environment. The visual system carries out a number of complex tasks, including the reception of light and the formation of monocular neural representations, colour vision, the neural mechanisms underlying stereopsis and assessment of distances to and between objects, the identification of particular object of interest, motion perception, the analysis and integration of visual information, pattern recognition, accurate motor coordination under visual guidance, and more. The neuropsychological side of visual information processing is known as visual perception, an abnormality of which is called visual impairment, and a complete absence of which is called blindness. Non-image forming visual functions, independent of visual perception, include the pupillary light reflex (PLR) and circadian photoentrainment.
An accelerometer is a tool that measures proper acceleration. Proper acceleration is the acceleration of a body in its own instantaneous rest frame; this is different from coordinate acceleration, which is acceleration in a fixed coordinate system. For example, an accelerometer at rest on the surface of the Earth will measure an acceleration due to Earth's gravity, straight upwards of g ≈ 9.81 m/s2. By contrast, accelerometers in free fall will measure zero.
Statistical process control (SPC) is a method of quality control which employs statistical methods to monitor and control a process. This helps to ensure that the process operates efficiently, producing more specification-conforming products with less waste. SPC can be applied to any process where the "conforming product" output can be measured. Key tools used in SPC include run charts, control charts, a focus on continuous improvement, and the design of experiments. An example of a process where SPC is applied is manufacturing lines.
Motion detection is the process of detecting a change in the position of an object relative to its surroundings or a change in the surroundings relative to an object. It can be achieved by either mechanical or electronic methods. When it is done by natural organisms, it is called motion perception.

A security alarm is a system designed to detect intrusion, such as unauthorized entry, into a building or other areas such as a home or school. Security alarms used in residential, commercial, industrial, and military properties protect against burglary (theft) or property damage, as well as personal protection against intruders. Security alerts in neighborhoods show a connection with diminished robbery. Car alarms likewise help protect vehicles and their contents. Prisons also use security systems for the control of inmates.

A passive infrared sensor is an electronic sensor that measures infrared (IR) light radiating from objects in its field of view. They are most often used in PIR-based motion detectors. PIR sensors are commonly used in security alarms and automatic lighting applications.

A motion detector is an electrical device that utilizes a sensor to detect nearby motion. Such a device is often integrated as a component of a system that automatically performs a task or alerts a user of motion in an area. They form a vital component of security, automated lighting control, home control, energy efficiency, and other useful systems.
The following outline is provided as an overview of and topical guide to computer vision:
Electro-optical MASINT is a subdiscipline of Measurement and Signature Intelligence, (MASINT) and refers to intelligence gathering activities which bring together disparate elements that do not fit within the definitions of Signals Intelligence (SIGINT), Imagery Intelligence (IMINT), or Human Intelligence (HUMINT).
In computer vision, 3D object recognition involves recognizing and determining 3D information, such as the pose, volume, or shape, of user-chosen 3D objects in a photograph or range scan. Typically, an example of the object to be recognized is presented to a vision system in a controlled environment, and then for an arbitrary input such as a video stream, the system locates the previously presented object. This can be done either off-line, or in real-time. The algorithms for solving this problem are specialized for locating a single pre-identified object, and can be contrasted with algorithms which operate on general classes of objects, such as face recognition systems or 3D generic object recognition. Due to the low cost and ease of acquiring photographs, a significant amount of research has been devoted to 3D object recognition in photographs.

Mark A. O'Neill is an English computational biologist with interests in artificial intelligence, systems biology, complex systems and image analysis. He is the creator and lead programmer on a number of computational projects including the Digital Automated Identification SYstem (DAISY) for automated species identification and PUPS P3, an organic computing environment for Linux.

In robotics and computer vision, visual odometry is the process of determining the position and orientation of a robot by analyzing the associated camera images. It has been used in a wide variety of robotic applications, such as on the Mars Exploration Rovers.

The unattended ground sensor (UGS) is under development as part of the United States Army's Future Combat Systems Program. For information on currently fielded UGS systems, refer to the Current Force UGS Program or CF UGS.
Driver drowsiness detection is a car safety technology which helps prevent accidents caused by the driver getting drowsy. Various studies have suggested that around 20% of all road accidents are fatigue-related, up to 50% on certain roads.
A driveway alarm is a device that is designed to detect people or vehicles entering a property via the driveway. A driveway alarm system is often integrated as a component of a system which automatically performs a task or alerts home owners of an unexpected intruder or visitor. Driveway alarms can be a vital component of security, automated lighting control, home control, energy efficiency, and other useful systems.

Baited remote underwater video (BRUV) is a system used in marine biology research. By attracting fish into the field of view of a remotely controlled camera, the technique records fish diversity, abundance and behaviour of species. Sites are sampled by video recording the region surrounding a baited canister which is lowered to the bottom from a surface vessel or less commonly by a submersible or remotely operated underwater vehicle. The video can be transmitted directly to the surface by cable, or recorded for later analysis.
Artificial intelligence for video surveillance utilizes computer software programs that analyze the audio and images from video surveillance cameras in order to recognize humans, vehicles, objects, attributes, and events. Security contractors program is the software to define restricted areas within the camera's view and program for times of day for the property being protected by the camera surveillance. The artificial intelligence ("A.I.") sends an alert if it detects a trespasser breaking the "rule" set that no person is allowed in that area during that time of day.
A video management system, also known as video management software plus a video management server, is a component of a security camera system that in general:








