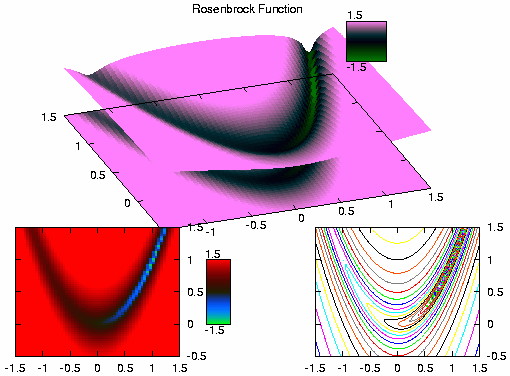
The global minimum is inside a long, narrow, parabolic-shaped flat valley. To find the valley is trivial. To converge to the global minimum, however, is difficult.
The function is defined by
It has a global minimum at , where . Usually, these parameters are set such that and . Only in the trivial case where the function is symmetric and the minimum is at the origin.
Multidimensional generalizations
Two variants are commonly encountered.
Animation of Rosenbrock's function of three variables.
One is the sum of uncoupled 2D Rosenbrock problems, and is defined only for evens:
has exactly one minimum for (at ) and exactly two minima for — the global minimum at and a local minimum near . This result is obtained by setting the gradient of the function equal to zero, noticing that the resulting equation is a rational function of . For small the polynomials can be determined exactly and Sturm's theorem can be used to determine the number of realroots, while the roots can be bounded in the region of .[5] For larger this method breaks down due to the size of the coefficients involved.
Stationary points
Many of the stationary points of the function exhibit a regular pattern when plotted.[5] This structure can be exploited to locate them.
Rosenbrock roots exhibiting hump structures
Optimization examples
Nelder-Mead method applied to the Rosenbrock function
The Rosenbrock function can be efficiently optimized by adapting appropriate coordinate system without using any gradient information and without building local approximation models (in contrast to many derivate-free optimizers). The following figure illustrates an example of 2-dimensional Rosenbrock function optimization by adaptive coordinate descent from starting point . The solution with the function value can be found after 325 function evaluations.
Using the Nelder–Mead method from starting point with a regular initial simplex a minimum is found with function value after 185 function evaluations. The figure below visualizes the evolution of the algorithm.
Use in other fields
The Rosenbrock function can be used to create "banana"-shaped distributions, which are a popular benchmark model in statistics and machine learning.[6]
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.




























{kind=link}