If 0° ≤ θ ≤ 90°, as in this case, the scalar projection of a on b coincides with the length of the vector projection.Vector projection of a on b (a1), and vector rejection of a from b (a2).
In mathematics, the scalar projection of a vector on (or onto) a vector also known as the scalar resolute of in the direction of is given by:
The scalar projection is a scalar, equal to the length of the orthogonal projection of on , with a negative sign if the projection has an opposite direction with respect to .
Multiplying the scalar projection of on by converts it into the above-mentioned orthogonal projection, also called vector projection of on .
Definition based on angle θ
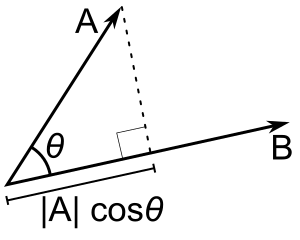
If the angle between and is known, the scalar projection of on can be computed using
( in the figure)
The formula above can be inverted to obtain the angle, θ.
Definition in terms of a and b
When is not known, the cosine of can be computed in terms of and by the following property of the dot product:
By this property, the definition of the scalar projection becomes:
Properties
The scalar projection has a negative sign if . It coincides with the length of the corresponding vector projection if the angle is smaller than 90°. More exactly, if the vector projection is denoted and its length :
↑ Strang, Gilbert (2016). Introduction to linear algebra (5thed.). Wellesley: Cambridge press. ISBN978-0-9802327-7-6.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.