The superformula is a generalization of the superellipse and was proposed by Johan Gielis in 2003. [1] Gielis suggested that the formula can be used to describe many complex shapes and curves that are found in nature. Gielis has filed a patent application related to the synthesis of patterns generated by the superformula, which expired effective 2020-05-10. [2]
Contents
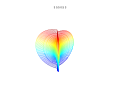
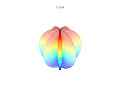
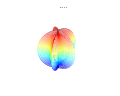
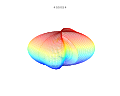
In polar coordinates, with the radius and the angle, the superformula is:


By choosing different values for the parameters and different shapes can be generated.



The formula was obtained by generalizing the superellipse, named and popularized by Piet Hein, a Danish mathematician.