Related Research Articles

Euclidean space is the fundamental space of geometry, intended to represent physical space. Originally, in Euclid's Elements, it was the three-dimensional space of Euclidean geometry, but in modern mathematics there are Euclidean spaces of any positive integer dimension n, which are called Euclidean n-spaces when one wants to specify their dimension. For n equal to one or two, they are commonly called respectively Euclidean lines and Euclidean planes. The qualifier "Euclidean" is used to distinguish Euclidean spaces from other spaces that were later considered in physics and modern mathematics.
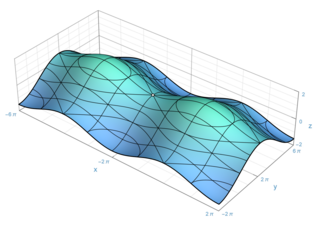
In the part of mathematics referred to as topology, a surface is a two-dimensional manifold. Some surfaces arise as the boundaries of three-dimensional solid figures; for example, the sphere is the boundary of the solid ball. Other surfaces arise as graphs of functions of two variables; see the figure at right. However, surfaces can also be defined abstractly, without reference to any ambient space. For example, the Klein bottle is a surface that cannot be embedded in three-dimensional Euclidean space.
In mathematics, an embedding is one instance of some mathematical structure contained within another instance, such as a group that is a subgroup.
In differential geometry, a Riemannian manifold is a geometric space on which many geometric notions such as distance, angles, length, volume, and curvature are defined. Euclidean space, the -sphere, hyperbolic space, and smooth surfaces in three-dimensional space, such as ellipsoids and paraboloids, are all examples of Riemannian manifolds. Riemannian manifolds are named after German mathematician Bernhard Riemann, who first conceptualized them.
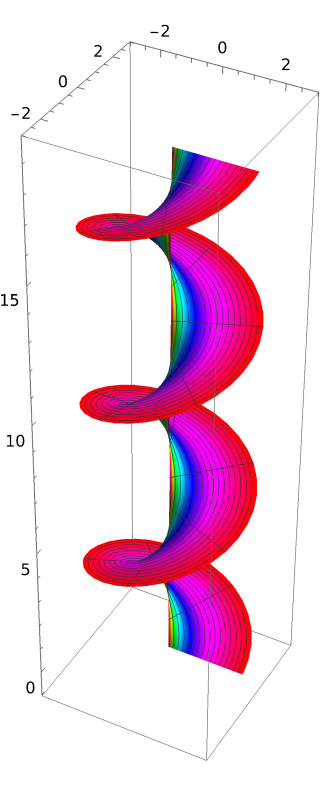
In mathematics, particularly in complex analysis, a Riemann surface is a connected one-dimensional complex manifold. These surfaces were first studied by and are named after Bernhard Riemann. Riemann surfaces can be thought of as deformed versions of the complex plane: locally near every point they look like patches of the complex plane, but the global topology can be quite different. For example, they can look like a sphere or a torus or several sheets glued together.
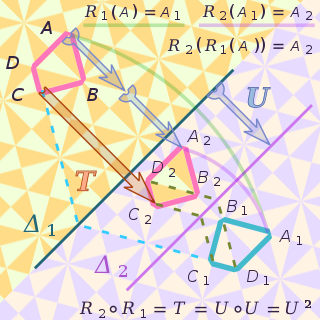
In mathematics, an isometry is a distance-preserving transformation between metric spaces, usually assumed to be bijective. The word isometry is derived from the Ancient Greek: ἴσος isos meaning "equal", and μέτρον metron meaning "measure". If the transformation is from a metric space to itself, it is a kind of geometric transformation known as a motion.

In mathematics, hyperbolic space of dimension n is the unique simply connected, n-dimensional Riemannian manifold of constant sectional curvature equal to −1. It is homogeneous, and satisfies the stronger property of being a symmetric space. There are many ways to construct it as an open subset of with an explicitly written Riemannian metric; such constructions are referred to as models. Hyperbolic 2-space, H2, which was the first instance studied, is also called the hyperbolic plane.

In mathematics, cobordism is a fundamental equivalence relation on the class of compact manifolds of the same dimension, set up using the concept of the boundary of a manifold. Two manifolds of the same dimension are cobordant if their disjoint union is the boundary of a compact manifold one dimension higher.
In mathematics, particularly in differential topology, there are two Whitney embedding theorems, named after Hassler Whitney:
This is a glossary of terms specific to differential geometry and differential topology. The following three glossaries are closely related:
In mathematics, geometric topology is the study of manifolds and maps between them, particularly embeddings of one manifold into another.

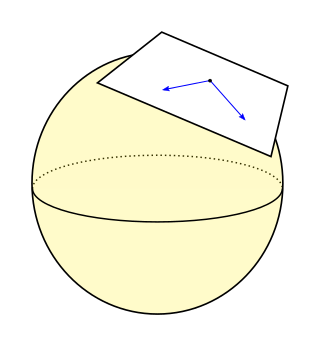
In mathematics, a manifold is a topological space that locally resembles Euclidean space near each point. More precisely, an -dimensional manifold, or -manifold for short, is a topological space with the property that each point has a neighborhood that is homeomorphic to an open subset of -dimensional Euclidean space.
Homological mirror symmetry is a mathematical conjecture made by Maxim Kontsevich. It seeks a systematic mathematical explanation for a phenomenon called mirror symmetry first observed by physicists studying string theory.
In mathematics, and especially differential topology and gauge theory, Donaldson's theorem states that a definite intersection form of a compact, oriented, smooth manifold of dimension 4 is diagonalisable. If the intersection form is positive (negative) definite, it can be diagonalized to the identity matrix over the integers. The original version of the theorem required the manifold to be simply connected, but it was later improved to apply to 4-manifolds with any fundamental group.
In the mathematical field of Lorentzian geometry, a Cauchy surface is a certain kind of submanifold of a Lorentzian manifold. In the application of Lorentzian geometry to the physics of general relativity, a Cauchy surface is usually interpreted as defining an "instant of time". In the mathematics of general relativity, Cauchy surfaces provide boundary conditions for the causal structure in which the Einstein equations can be solved
In mathematics, specifically in geometric topology, surgery theory is a collection of techniques used to produce one finite-dimensional manifold from another in a 'controlled' way, introduced by John Milnor. Milnor called this technique surgery, while Andrew Wallace called it spherical modification. The "surgery" on a differentiable manifold M of dimension , could be described as removing an imbedded sphere of dimension p from M. Originally developed for differentiable manifolds, surgery techniques also apply to piecewise linear (PL-) and topological manifolds.

In mathematics, the Arf invariant of a nonsingular quadratic form over a field of characteristic 2 was defined by Turkish mathematician Cahit Arf when he started the systematic study of quadratic forms over arbitrary fields of characteristic 2. The Arf invariant is the substitute, in characteristic 2, for the discriminant for quadratic forms in characteristic not 2. Arf used his invariant, among others, in his endeavor to classify quadratic forms in characteristic 2.

In mathematics, an immersion is a differentiable function between differentiable manifolds whose differential pushforward is everywhere injective. Explicitly, f : M → N is an immersion if
In 4-dimensional topology, a branch of mathematics, a Casson handle is a 4-dimensional topological 2-handle constructed by an infinite procedure. They are named for Andrew Casson, who introduced them in about 1973. They were originally called "flexible handles" by Casson himself, and Michael Freedman introduced the name "Casson handle" by which they are known today. In that work he showed that Casson handles are topological 2-handles, and used this to classify simply connected compact topological 4-manifolds.
In 4-dimensional topology, a branch of mathematics, Rokhlin's theorem states that if a smooth, orientable, closed 4-manifold M has a spin structure, then the signature of its intersection form, a quadratic form on the second cohomology group , is divisible by 16. The theorem is named for Vladimir Rokhlin, who proved it in 1952.
References
- ↑ Scorpan, Alexandru (2005), The Wild World of 4-manifolds, American Mathematical Society, p. 560, ISBN 9780821837498 .
| | This topology-related article is a stub. You can help Wikipedia by expanding it. |