
Mars Express is a space exploration mission being conducted by the European Space Agency (ESA). The Mars Express mission is exploring the planet Mars, and is the first planetary mission attempted by the agency. "Express" originally referred to the speed and efficiency with which the spacecraft was designed and built. However, "Express" also describes the spacecraft's relatively short interplanetary voyage, a result of being launched when the orbits of Earth and Mars brought them closer than they had been in about 60,000 years.

The Mars Reconnaissance Orbiter (MRO) is a spacecraft designed to search for the existence of water on Mars and provide support for missions to Mars, as part of NASA's Mars Exploration Program. It was launched from Cape Canaveral on August 12, 2005, at 11:43 UTC and reached Mars on March 10, 2006, at 21:24 UTC. In November 2006, after six months of aerobraking, it entered its final science orbit and began its primary science phase.

The Norwegian Defence Research Establishment is a research institute that conducts research and development on behalf of the Norwegian Armed Forces and provides expert advice to political and military defence leaders. In particular, its task is to keep track of advances in the fields of science and military technology which might affect the assumptions on which Norwegian security policy and/or defence planning is based.
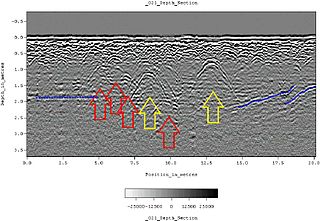
Ground-penetrating radar (GPR) is a geophysical method that uses radar pulses to image the subsurface. It is a non-intrusive method of surveying the sub-surface to investigate underground utilities such as concrete, asphalt, metals, pipes, cables or masonry. This nondestructive method uses electromagnetic radiation in the microwave band of the radio spectrum, and detects the reflected signals from subsurface structures. GPR can have applications in a variety of media, including rock, soil, ice, fresh water, pavements and structures. In the right conditions, practitioners can use GPR to detect subsurface objects, changes in material properties, and voids and cracks.

MARSIS is a low frequency, pulse-limited radar sounder and altimeter developed by the University of Rome La Sapienza and Alenia Spazio. The Italian MARSIS instrument, which is operated by the European Space Agency, is operational and orbits Mars as an instrument for the ESA's Mars Express exploration mission.

SHARAD is a subsurface sounding radar embarked on the Mars Reconnaissance Orbiter (MRO) probe. It complements the MARSIS radar on Mars Express orbiter, providing lower penetration capabilities but much finer resolution.

A rover is a planetary surface exploration device designed to move over the rough surface of a planet or other planetary mass celestial bodies. Some rovers have been designed as land vehicles to transport members of a human spaceflight crew; others have been partially or fully autonomous robots. Rovers are typically created to land on another planet via a lander-style spacecraft, tasked to collect information about the terrain, and to take crust samples such as dust, soil, rocks, and even liquids. They are essential tools in space exploration.

Northern Light was a concept mission for a robotic mission to Mars that would consist of a lander and a rover, being studied by a consortium of Canadian universities, companies and organisations. The primary contractor for the spacecraft was Thoth Technology Inc.

A lunar rover or Moon rover is a space exploration vehicle designed to move across the surface of the Moon. The Apollo program's Lunar Roving Vehicle was driven on the Moon by members of three American crews, Apollo 15, 16, and 17. Other rovers have been partially or fully autonomous robots, such as the Soviet Union's Lunokhods, Chinese Yutus, Indian Pragyan, and Japan's LEVs. Five countries have had operating rovers on the Moon: the Soviet Union, the United States, China, India, and Japan.

K10 are rovers used to explore planetary surfaces. Each third-generation K10 has four-wheel drive, all-wheel steering and a passive averaging suspension. This helps reduce the motion induced by travel over uneven ground. The K10 has mounting points on its front, back, and bottom that allows for antennas, sensors, and other scientific instruments to be attached. The K10 controller runs on a Linux laptop and communicates via 802.11g wireless, or a Tropos mesh wireless.
Rosalind Franklin, previously known as the ExoMars rover, is a planned robotic Mars rover, part of the international ExoMars programme led by the European Space Agency and the Russian Roscosmos State Corporation. The mission was scheduled to launch in July 2020, but was postponed to 2022. The Russian invasion of Ukraine has caused an indefinite delay of the programme, as the member states of the ESA voted to suspend the joint mission with Russia; in July 2022, ESA terminated its cooperation on the project with Russia. As of May 2022, the launch of the rover is not expected to occur before 2028 due to the need for a new non-Russian landing platform.
MELOS is a Japanese rover mission concept under study for an engineering demonstration of precision landing, and to look for possible biosignatures on Mars using a rover. JAXA has not published updates since 2015.
Mars 2020 is a NASA mission that includes the rover Perseverance, the now-retired small robotic helicopter Ingenuity, and associated delivery systems, as part of the Mars Exploration Program. Mars 2020 was launched on an Atlas V rocket at 11:50:01 UTC on July 30, 2020, and landed in the Martian crater Jezero on February 18, 2021, with confirmation received at 20:55 UTC. On March 5, 2021, NASA named the landing site Octavia E. Butler Landing. As of 7 August 2024, Perseverance has been on Mars for 1232 sols. Ingenuity operated on Mars for 1042 sols before sustaining serious damage to its rotor blades, possibly all four, causing NASA to retire the craft on January 25, 2024.
US Radar is a manufacturer and distributor of Surface Penetrating Radar (SPR), also known as ground penetrating radar (GPR), systems.

Tianwen-1 Chinese: 天问一号 is an interplanetary mission by the China National Space Administration (CNSA) which sent a robotic spacecraft to Mars, consisting of 6 spacecraft: an orbiter, two deployable cameras, lander, remote camera, and the Zhurong rover. The spacecraft, with a total mass of nearly five tons, is one of the heaviest probes launched to Mars and carries 14 scientific instruments. It is the first in a series of planned missions undertaken by CNSA as part of its Planetary Exploration of China program.
WISDOM is a ground-penetrating radar that is part of the science payload on board the European Space Agency'sRosalind Franklin rover, tasked to search for biosignatures and biomarkers on Mars. The rover is planned to be launched not earlier than 2028 and land on Mars in 2029.

Perseverance, nicknamed Percy, is a car-sized Mars rover designed to explore the Jezero crater on Mars as part of NASA's Mars 2020 mission. It was manufactured by the Jet Propulsion Laboratory and launched on July 30, 2020, at 11:50 UTC. Confirmation that the rover successfully landed on Mars was received on February 18, 2021, at 20:55 UTC. As of 9 August 2024, Perseverance has been active on Mars for 1234 sols since its landing. Following the rover's arrival, NASA named the landing site Octavia E. Butler Landing.

Håvard Fjær Grip is a Norwegian cybernetics engineer and robotics technologist. He was the chief pilot of NASA's Jet Propulsion Laboratory's Mars helicopter, Ingenuity, and led the development of its aerodynamics and flight control system. Grip successfully flew Ingenuity's first flight on Mars on April 19, 2021, which made history as the first extraterrestrial helicopter flight. As of October 2023, he is chief engineer of the Mars Sample Recovery Helicopters, part of the NASA-ESA Mars Sample Return campaign.

Zhurong is a Chinese rover on Mars, the country's first to land on another planet after it previously landed two rovers on the Moon. The rover is part of the Tianwen-1 mission to Mars conducted by the China National Space Administration (CNSA).
Svein-Erik Hamran is a Norwegian professor in radar remote sensing at the University of Oslo. He led the development of the Radar Imager for Mars' subsurface experiment (RIMFAX) for the Mars rover Perservance as Principal Investigator for the Norwegian Defence Research Establishment (FFI), and is a Co-Principal Investigator for the WISDOM radar on the European Space Agency'sRosalind Franklin rover.


