Deep Space 1 (DS1) was a NASA technology demonstration spacecraft which flew by an asteroid and a comet. It was part of the New Millennium Program, dedicated to testing advanced technologies.

2001 Mars Odyssey is a robotic spacecraft orbiting the planet Mars. The project was developed by NASA, and contracted out to Lockheed Martin, with an expected cost for the entire mission of US$297 million. Its mission is to use spectrometers and a thermal imager to detect evidence of past or present water and ice, as well as study the planet's geology and radiation environment. It is hoped that the data Odyssey obtains will help answer the question of whether life existed on Mars and create a risk-assessment of the radiation that future astronauts on Mars might experience. It also acts as a relay for communications between the Curiosity rover, and previously the Mars Exploration Rovers and Phoenix lander, to Earth. The mission was named as a tribute to Arthur C. Clarke, evoking the name of his and Stanley Kubrick's 1968 film 2001: A Space Odyssey.

NASA's Mars Exploration Rover (MER) mission was a robotic space mission involving two Mars rovers, Spirit and Opportunity, exploring the planet Mars. It began in 2003 with the launch of the two rovers to explore the Martian surface and geology; both landed on Mars at separate locations in January 2004. Both rovers far outlived their planned missions of 90 Martian solar days: MER-A Spirit was active until March 22, 2010, while MER-B Opportunity was active until June 10, 2018.
Opportunity, also known as MER-B or MER-1, is a robotic rover that was active on Mars from 2004 until 2018. Opportunity was operational on Mars for 5111 sols. Launched on July 7, 2003, as part of NASA's Mars Exploration Rover program, it landed in Meridiani Planum on January 25, 2004, three weeks after its twin, Spirit (MER-A), touched down on the other side of the planet. With a planned 90-sol duration of activity, Spirit functioned until it got stuck in 2009 and ceased communications in 2010, while Opportunity was able to stay operational for 5111 sols after landing, maintaining its power and key systems through continual recharging of its batteries using solar power, and hibernating during events such as dust storms to save power. This careful operation allowed Opportunity to operate for 57 times its designed lifespan, exceeding the initial plan by 14 years, 47 days. By June 10, 2018, when it last contacted NASA, the rover had traveled a distance of 45.16 kilometers.

A Mars rover is a motor vehicle designed to travel on the surface of Mars. Rovers have several advantages over stationary landers: they examine more territory, they can be directed to interesting features, they can place themselves in sunny positions to weather winter months, and they can advance the knowledge of how to perform very remote robotic vehicle control. They serve a different purpose than orbital spacecraft like Mars Reconnaissance Orbiter. A more recent development is the Mars helicopter.

Mars Reconnaissance Orbiter (MRO) is a spacecraft designed to search for the existence of water on Mars, as part of NASA's Mars Exploration Program. It was launched from Cape Canaveral on August 12, 2005, at 11:43 UTC and reached Mars on March 10, 2006, at 21:24 UTC. In November 2006, after six months of aerobraking, it entered its final science orbit and began its primary science phase.

Mars Science Laboratory (MSL) is a robotic space probe mission to Mars launched by NASA on November 26, 2011, which successfully landed Curiosity, a Mars rover, in Gale Crater on August 6, 2012. The overall objectives include investigating Mars' habitability, studying its climate and geology, and collecting data for a human mission to Mars. The rover carries a variety of scientific instruments designed by an international team.
Maestro (software) was a free program released by NASA to allow users to view photos and daily progress of the Spirit and Opportunity rovers. It served as an activity planner for Mars that utilized a combination of 2D and 3D visuals to track the movement and missions of the Spirit and Opportunity rovers in 2004.

Malin Space Science Systems (MSSS) is a San Diego, California-based private technology company that designs, develops, and operates instruments and technical equipment to fly on unmanned spacecraft. MSSS is headed by chief scientist and CEO Michael C. Malin.

Hazcams are photographic cameras mounted on the front and rear of NASA's Spirit, Opportunity, Curiosity and Perseverance rover missions to Mars and on the lower front portion of Chinese Yutu rover mission to the Moon.

The MarsDial is a sundial that was devised for missions to Mars. It is used to calibrate the Pancam cameras of the Mars landers. MarsDials were placed on the Spirit and Opportunity Mars rovers, inscribed with the words "Two worlds, One sun" and the word "Mars" in 22 languages. The MarsDial can function as a gnomon, the stick or other vertical part of a sundial. The length and direction of the shadow cast by the stick allows observers to calculate the time of day. The sundial can also be used to tell which way is North, and to overcome the limitations of a magnetic north different from a true north.

James F. Bell III is a professor of Astronomy at Arizona State University, specializing in the study of planetary geology, geochemistry and mineralogy using data obtained from telescopes and from various spacecraft missions. Bell's active research has involved the NASA Mars Pathfinder, Near Earth Asteroid Rendezvous (NEAR), Comet Nucleus Tour (CONTOUR), 2001 Mars Odyssey, Mars Reconnaissance Orbiter, Lunar Reconnaissance Orbiter, and the Mars Science Laboratory missions. His book Postcards from Mars includes many images taken by the Mars rovers. Bell is currently an editor of the space science journal Icarus and president of The Planetary Society. He has served as the lead scientist in charge of the Panoramic camera (Pancam) color imaging system on Mars rovers Spirit and Opportunity.

The Mars Orbiter Camera and Mars Observer Camera (MOC) were scientific instruments on board the Mars Observer and Mars Global Surveyor spacecraft. The camera was built by Malin Space Science Systems (MSSS) for NASA and the cost of the whole MOC scientific investigation project was about US$44 million, higher than anticipated in the budget.
Curiosity is a car-sized Mars rover designed to explore the Gale crater on Mars as part of NASA's Mars Science Laboratory (MSL) mission. Curiosity was launched from Cape Canaveral (CCAFS) on November 26, 2011, at 15:02:00 UTC and landed on Aeolis Palus inside Gale crater on Mars on August 6, 2012, 05:17:57 UTC. The Bradbury Landing site was less than 2.4 km (1.5 mi) from the center of the rover's touchdown target after a 560 million km (350 million mi) journey.

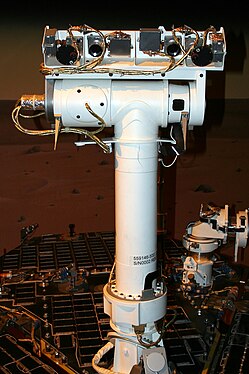
Each Pancam is one of two electronic stereo cameras on Mars Exploration Rovers Spirit and Opportunity. It has a filter wheel assembly that enables it to view different wavelengths of light and the pair of Pancams are mounted beside two NavCams on the MER camera bar assembly.

OSIRIS is the main scientific imaging system on the orbiter of the ESA spacecraft Rosetta for its mission to comet 67P/Churyumov–Gerasimenko. It was built by a consortium led by the German Max Planck Institute for Solar System Research.

A space selfie is a selfie that is taken in outer space. This include selfies taken by astronauts, machines and by indirect methods.
The following outline is provided as an overview of and topical guide to Mars:

CAESAR is a sample-return mission concept to comet 67P/Churyumov–Gerasimenko. The mission was proposed in 2017 to NASA's New Frontiers program mission 4, and on 20 December 2017 it was one of two finalists selected for further concept development. On 27 June 2019, the other finalist, the Dragonfly mission, was chosen instead.
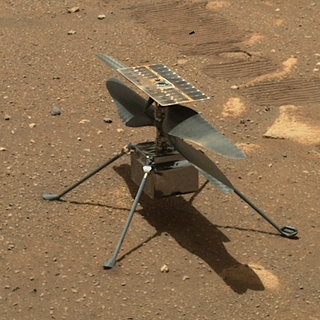
Ingenuity, nicknamed Ginny, is a small robotic helicopter operating on Mars. It is part of NASA's Mars 2020 mission, along with the Perseverance rover, which landed with Ingenuity attached to its underside on February 18, 2021. The helicopter was deployed to the surface on April 3, 2021. On April 19, it successfully made the first powered controlled extraterrestrial flight by an aircraft, taking off vertically, hovering, and landing for a flight duration of 39.1 seconds. As of its 46th flight on February 25, 2023, the helicopter has been flightworthy for 677 days.