
Mars Hand Lens Imager (MAHLI) is one of seventeen cameras on the Curiosity rover on the Mars Science Laboratory mission.
Contents

Mars Hand Lens Imager (MAHLI) is one of seventeen cameras on the Curiosity rover on the Mars Science Laboratory mission.
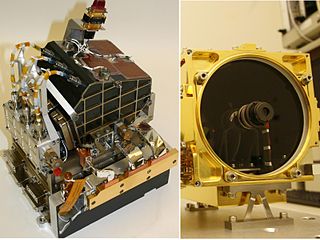
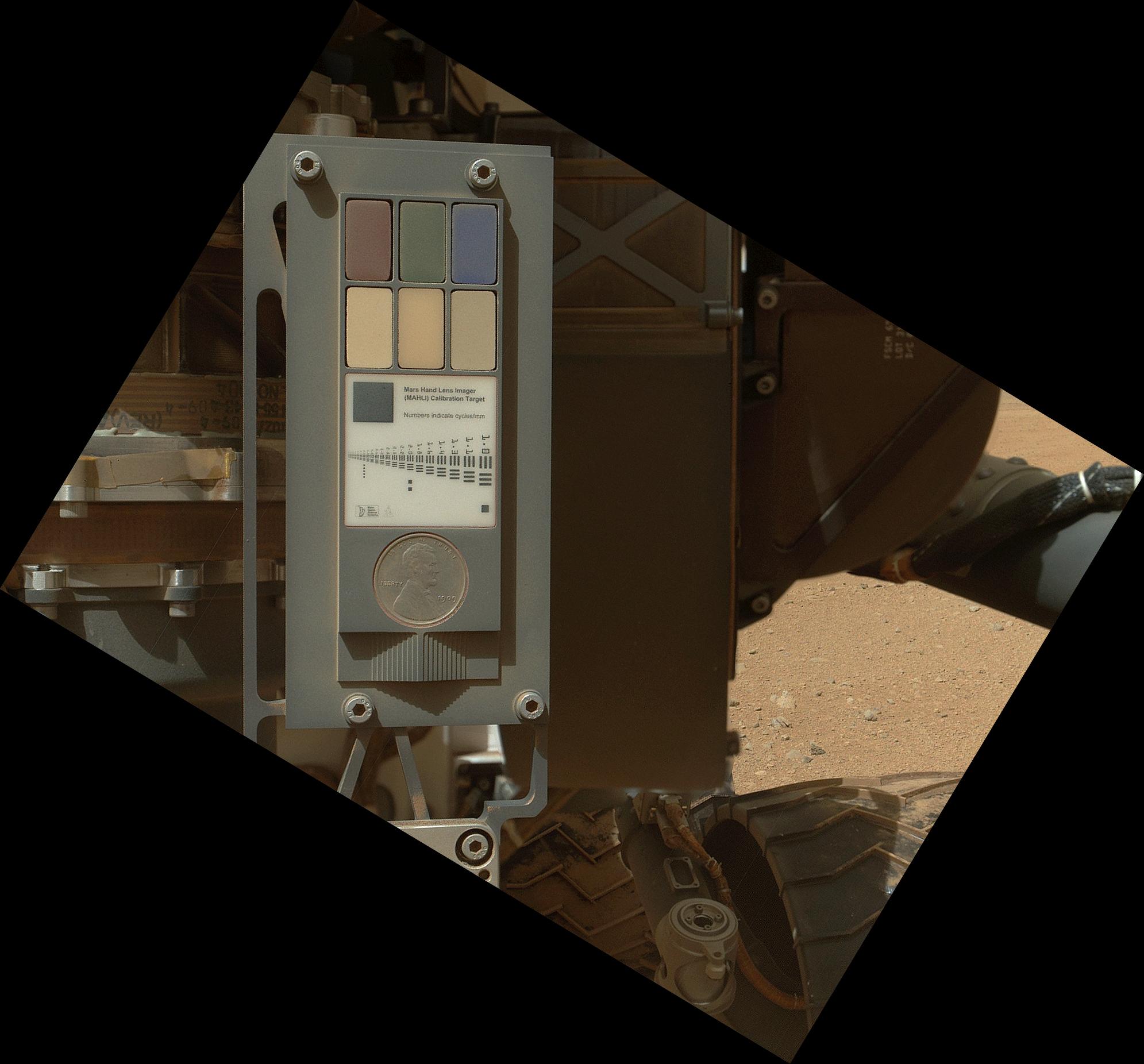
The instrument is mounted on the rover's robotic arm. It is primarily used to acquire microscopic images of rock and soil, but it can also be used for other images. MAHLI can take true-color images at 1600×1200 pixels with a resolution as high as 14.5 micrometers per pixel. [1] MAHLI has an 18.3 mm to 21.3 mm focal length and a 33.8- to 38.5-degree field of view. [2] MAHLI has both white and ultraviolet LED illumination for imaging in darkness or fluorescence imaging. MAHLI also has mechanical focusing in a range from infinite to millimetre distances. [2] This system can make some images with focus stacking processing. [2] MAHLI can store either the raw images or do real-time lossless predictive or JPEG compression. [2] The calibration target (3-D image) for MAHLI includes color references, a metric bar graphic, a 1909 VDB Lincoln penny, and a stairstep pattern for depth calibration. [3]
NASA says, "The main purpose of Curiosity's MAHLI camera is to acquire close-up, high-resolution views of rocks and soil at the rover's Gale Crater field site. The camera is capable of focusing on any target at distances of about 0.8 inch (2.1 centimeters) to infinity. This means it can, as shown here, also obtain pictures of the Martian landscape." [4]
The device is also used to take photos of the rover. One of those photos was considered in 2013 by Discovery News as one of the best space robot selfies. [5]

Mars Pathfinder is an American robotic spacecraft that landed a base station with a roving probe on Mars in 1997. It consisted of a lander, renamed the Carl Sagan Memorial Station, and a lightweight, 10.6 kg (23 lb) wheeled robotic Mars rover named Sojourner, the first rover to operate outside the Earth–Moon system.

Spirit, also known as MER-A or MER-2, is a Mars robotic rover, active from 2004 to 2010. Spirit was operational on Mars for 2208 sols or 3.3 Martian years. It was one of two rovers of NASA's Mars Exploration Rover Mission managed by the Jet Propulsion Laboratory (JPL). Spirit landed successfully within the impact crater Gusev on Mars at 04:35 Ground UTC on January 4, 2004, three weeks before its twin, Opportunity (MER-B), which landed on the other side of the planet. Its name was chosen through a NASA-sponsored student essay competition. The rover got stuck in a "sand trap" in late 2009 at an angle that hampered recharging of its batteries; its last communication with Earth was on March 22, 2010.

Mars Reconnaissance Orbiter (MRO) is a spacecraft designed to search for the existence of water on Mars, as part of NASA's Mars Exploration Program. It was launched from Cape Canaveral on August 12, 2005, at 11:43 UTC and reached Mars on March 10, 2006, at 21:24 UTC. In November 2006, after six months of aerobraking, it entered its final science orbit and began its primary science phase.

Mars Science Laboratory (MSL) is a robotic space probe mission to Mars launched by NASA on November 26, 2011, which successfully landed Curiosity, a Mars rover, in Gale Crater on August 6, 2012. The overall objectives include investigating Mars' habitability, studying its climate and geology, and collecting data for a human mission to Mars. The rover carries a variety of scientific instruments designed by an international team.

Malin Space Science Systems (MSSS) is a San Diego, California-based private technology company that designs, develops, and operates instruments and technical equipment to fly on unmanned spacecraft. MSSS is headed by chief scientist and CEO Michael C. Malin.

High Resolution Imaging Science Experiment is a camera on board the Mars Reconnaissance Orbiter which has been orbiting and studying Mars since 2006. The 65 kg (143 lb), US$40 million instrument was built under the direction of the University of Arizona's Lunar and Planetary Laboratory by Ball Aerospace & Technologies Corp. It consists of a 0.5 m (19.7 in) aperture reflecting telescope, the largest so far of any deep space mission, which allows it to take pictures of Mars with resolutions of 0.3 m/pixel, resolving objects below a meter across.

Focus stacking is a digital image processing technique which combines multiple images taken at different focus distances to give a resulting image with a greater depth of field (DOF) than any of the individual source images. Focus stacking can be used in any situation where individual images have a very shallow depth of field; macro photography and optical microscopy are two typical examples. Focus stacking can also be useful in landscape photography.
Camera, hand lens, and microscope probe (CHAMP) is a microscope capable of color imaging with a spatial resolution ranging from infinity imaging down to 3 µm per pixel. The instrument was originally developed through the Mars Instrument Development Program (MIDP) in support of robotic field investigations, and was an instrument proposed for use on the 2011 Mars Science Laboratory rover mission to Mars. The instrument would allow examination of Martian surface features and materials on spatial scales ranging from kilometers to micrometers, thus enabling both microscopy and context imaging with high operational flexibility. The instrument would allow for a better understanding of the evolution of the Martian surface over time. More specifically CHAMP would help gather data for a potential habitat for life on Mars.

Curiosity is a car-sized Mars rover designed to explore the Gale crater on Mars as part of NASA's Mars Science Laboratory (MSL) mission. Curiosity was launched from Cape Canaveral (CCAFS) on November 26, 2011, at 15:02:00 UTC and landed on Aeolis Palus inside Gale crater on Mars on August 6, 2012, 05:17:57 UTC. The Bradbury Landing site was less than 2.4 km (1.5 mi) from the center of the rover's touchdown target after a 560 million km (350 million mi) journey.

The Mars Science Laboratory and its rover, Curiosity, were launched from Earth on November 26, 2011. As of March 12, 2023, Curiosity has been on the planet Mars for 3767 sols since landing on August 6, 2012. (See Current status.)
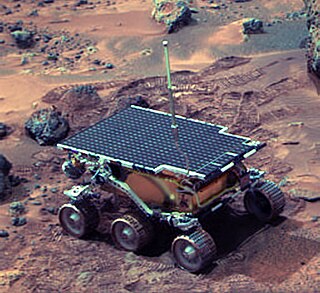
Sojourner is a robotic Mars rover that landed in the Ares Vallis channel in the Chryse Planitia region of the Oxia Palus quadrangle on July 4, 1997. Sojourner was operational on Mars for 92 sols. It was the first wheeled vehicle to rove on a planet other than Earth and formed part of the Mars Pathfinder mission.

Each Pancam is one of two electronic stereo cameras on Mars Exploration Rovers Spirit and Opportunity. It has a filter wheel assembly that enables it to view different wavelengths of light and the pair of Pancams are mounted beside two NavCams on the MER camera bar assembly.

Bathurst Inlet is a rock on the surface of Aeolis Palus, between Peace Vallis and Aeolis Mons, in Gale crater on the planet Mars. The rock was encountered by the Curiosity rover on the way from Bradbury Landing to Glenelg Intrigue on September 30, 2012 and was named after Bathurst Inlet, a deep inlet located along the northern coast of the Canadian mainland. The "approximate" site coordinates are: 4.59°S 137.44°E.

Rocknest is a sand patch on the surface of Aeolis Palus, between Peace Vallis and Aeolis Mons, in Gale crater on the planet Mars. The patch was encountered by the Curiosity rover on the way from Bradbury Landing to Glenelg Intrigue on September 28, 2012. The approximate site coordinates are: 4.59°S 137.44°E.
Chemistry and Camera complex (ChemCam) is a suite of remote sensing instruments on Mars for the Curiosity rover. As the name implies, ChemCam is actually two different instruments combined as one: a laser-induced breakdown spectroscopy (LIBS) and a Remote Micro Imager (RMI) telescope. The purpose of the LIBS instrument is to provide elemental compositions of rock and soil, while the RMI will give ChemCam scientists high-resolution images of the sampling areas of the rocks and soil that LIBS targets. The LIBS instrument can target a rock or soil sample from up to 7 m (23 ft) away, vaporizing a small amount of it with about 30 5-nanosecond pulses from a 1067 nm infrared laser and then observing the spectrum of the light emitted by the vaporized rock.

A space selfie is a selfie that is taken in outer space. This include selfies taken by astronauts, machines and by indirect methods.
Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals (SHERLOC) is an ultraviolet Raman spectrometer that uses fine-scale imaging and an ultraviolet (UV) laser to determine fine-scale mineralogy, and detect organic compounds designed for the Perseverance rover as part of the Mars 2020 mission. It was constructed at the Jet Propulsion Laboratory with major subsystems being delivered from Malin Space Science Systems and Los Alamos National Laboratory. The Principal Investigator is Luther Beegle, and the Deputy Principal Investigator is Rohit Bhartia.

Mastcam-Z is a multispectral, stereoscopic imaging instrument. It serves as the primary science camera on NASA's Perseverance rover. The Principal Investigator is Jim Bell of Arizona State University. The instrument was designed and built by Malin Space Science Systems in San Diego, California.

Perseverance, nicknamed Percy, is a car-sized Mars rover designed to explore the Jezero crater on Mars as part of NASA's Mars 2020 mission. It was manufactured by the Jet Propulsion Laboratory and launched on July 30, 2020, at 11:50 UTC. Confirmation that the rover successfully landed on Mars was received on February 18, 2021, at 20:55 UTC. As of 12 March 2023, Perseverance has been active on Mars for 732 sols since its landing. Following the rover's arrival, NASA named the landing site Octavia E. Butler Landing.
| General |  | |
|---|---|---|
| Instruments | ||
| Features | ||
| Sites | ||
| Rocks | ||
| Related | ||
| Geography | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Astronomy |
| ||||||||||
| Exploration |
| ||||||||||
| Related | |||||||||||
{kind=link}
{kind=link}