Oscillation is the repetitive or periodic variation, typically in time, of some measure about a central value (often a point of equilibrium) or between two or more different states. Familiar examples of oscillation include a swinging pendulum and alternating current. Oscillations can be used in physics to approximate complex interactions, such as those between atoms.
The simplest mechanical oscillating system is a weight attached to a linearspring subject to only weight and tension. Such a system may be approximated on an air table or ice surface. The system is in an equilibrium state when the spring is static. If the system is displaced from the equilibrium, there is a net restoring force on the mass, tending to bring it back to equilibrium. However, in moving the mass back to the equilibrium position, it has acquired momentum which keeps it moving beyond that position, establishing a new restoring force in the opposite sense. If a constant force such as gravity is added to the system, the point of equilibrium is shifted. The time taken for an oscillation to occur is often referred to as the oscillatory period.
The systems where the restoring force on a body is directly proportional to its displacement, such as the dynamics of the spring-mass system, are described mathematically by the simple harmonic oscillator and the regular periodic motion is known as simple harmonic motion. In the spring-mass system, oscillations occur because, at the static equilibrium displacement, the mass has kinetic energy which is converted into potential energy stored in the spring at the extremes of its path. The spring-mass system illustrates some common features of oscillation, namely the existence of an equilibrium and the presence of a restoring force which grows stronger the further the system deviates from equilibrium.
In the case of the spring-mass system, Hooke's law states that the restoring force of a spring is:
The solution to this differential equation produces a sinusoidal position function:
where ω is the frequency of the oscillation, A is the amplitude, and δ is the phase shift of the function. These are determined by the initial conditions of the system. Because cosine oscillates between 1 and −1 infinitely, our spring-mass system would oscillate between the positive and negative amplitude forever without friction.
Two-dimensional oscillators
In two or three dimensions, harmonic oscillators behave similarly to one dimension. The simplest example of this is an isotropic oscillator, where the restoring force is proportional to the displacement from equilibrium with the same restorative constant in all directions.
This produces a similar solution, but now there is a different equation for every direction.
Anisotropic oscillators
With anisotropic oscillators, different directions have different constants of restoring forces. The solution is similar to isotropic oscillators, but there is a different frequency in each direction. Varying the frequencies relative to each other can produce interesting results. For example, if the frequency in one direction is twice that of another, a figure eight pattern is produced. If the ratio of frequencies is irrational, the motion is quasiperiodic. This motion is periodic on each axis, but is not periodic with respect to r, and will never repeat.[1]
Phase portrait of damped oscillator, with increasing damping strength.
All real-world oscillator systems are thermodynamically irreversible. This means there are dissipative processes such as friction or electrical resistance which continually convert some of the energy stored in the oscillator into heat in the environment. This is called damping. Thus, oscillations tend to decay with time unless there is some net source of energy into the system. The simplest description of this decay process can be illustrated by oscillation decay of the harmonic oscillator.
Damped oscillators are created when a resistive force is introduced, which is dependent on the first derivative of the position, or in this case velocity. The differential equation created by Newton's second law adds in this resistive force with an arbitrary constant b. This example assumes a linear dependence on velocity.
This equation can be rewritten as before:
where .
This produces the general solution:
where .
The exponential term outside of the parenthesis is the decay function and β is the damping coefficient. There are 3 categories of damped oscillators: under-damped, where β < ω0; over-damped, where β > ω0; and critically damped, where β = ω0.
Driven oscillations
In addition, an oscillating system may be subject to some external force, as when an AC circuit is connected to an outside power source. In this case the oscillation is said to be driven.
The simplest example of this is a spring-mass system with a sinusoidal driving force.
where This gives the solution:
where and
The second term of x(t) is the transient solution to the differential equation. The transient solution can be found by using the initial conditions of the system.
Some systems can be excited by energy transfer from the environment. This transfer typically occurs where systems are embedded in some fluid flow. For example, the phenomenon of flutter in aerodynamics occurs when an arbitrarily small displacement of an aircraftwing (from its equilibrium) results in an increase in the angle of attack of the wing on the air flow and a consequential increase in lift coefficient, leading to a still greater displacement. At sufficiently large displacements, the stiffness of the wing dominates to provide the restoring force that enables an oscillation.
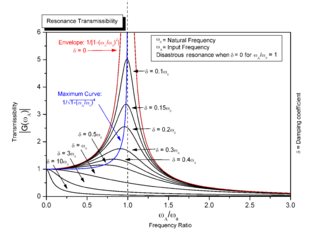
Resonance
Resonance occurs in a damped driven oscillator when ω = ω0, that is, when the driving frequency is equal to the natural frequency of the system. When this occurs, the denominator of the amplitude is minimized, which maximizes the amplitude of the oscillations.
Coupled oscillations
Two pendulums with the same period fixed on a string act as pair of coupled oscillators. The oscillation alternates between the two.
Experimental Setup of Huygens synchronization of two clocks
The harmonic oscillator and the systems it models have a single degree of freedom. More complicated systems have more degrees of freedom, for example, two masses and three springs (each mass being attached to fixed points and to each other). In such cases, the behavior of each variable influences that of the others. This leads to a coupling of the oscillations of the individual degrees of freedom. For example, two pendulum clocks (of identical frequency) mounted on a common wall will tend to synchronise. This phenomenon was first observed by Christiaan Huygens in 1665.[2] The apparent motions of the compound oscillations typically appears very complicated but a more economic, computationally simpler and conceptually deeper description is given by resolving the motion into normal modes.
The simplest form of coupled oscillators is a 3 spring, 2 mass system, where masses and spring constants are the same. This problem begins with deriving Newton's second law for both masses.
The equations are then generalized into matrix form.
where , , and
The values of k and m can be substituted into the matrices.
These matrices can now be plugged into the general solution.[clarification needed]
The determinant of this matrix yields a quadratic equation.
Depending on the starting point of the masses, this system has 2 possible frequencies (or a combination of the two). If the masses are started with their displacements in the same direction, the frequency is that of a single mass system, because the middle spring is never extended. If the two masses are started in opposite directions, the second, faster frequency is the frequency of the system.[1]
More special cases are the coupled oscillators where energy alternates between two forms of oscillation. Well-known is the Wilberforce pendulum, where the oscillation alternates between the elongation of a vertical spring and the rotation of an object at the end of that spring.
Coupled oscillators are a common description of two related, but different phenomena. One case is where both oscillations affect each other mutually, which usually leads to the occurrence of a single, entrained oscillation state, where both oscillate with a compromise frequency. Another case is where one external oscillation affects an internal oscillation, but is not affected by this. In this case the regions of synchronization, known as Arnold Tongues, can lead to highly complex phenomena as for instance chaotic dynamics.
Small oscillation approximation
In physics, a system with a set of conservative forces and an equilibrium point can be approximated as a harmonic oscillator near equilibrium. An example of this is the Lennard-Jones potential, where the potential is given by:
The equilibrium points of the function are then found:
The second derivative is then found, and used to be the effective potential constant:
The system will undergo oscillations near the equilibrium point. The force that creates these oscillations is derived from the effective potential constant above:
This differential equation can be re-written in the form of a simple harmonic oscillator:
This approximation can be better understood by looking at the potential curve of the system. By thinking of the potential curve as a hill, in which, if one placed a ball anywhere on the curve, the ball would roll down with the slope of the potential curve. This is true due to the relationship between potential energy and force.
By thinking of the potential in this way, one will see that at any local minimum there is a "well" in which the ball would roll back and forth (oscillate) between and . This approximation is also useful for thinking of Kepler orbits.
As the number of degrees of freedom becomes arbitrarily large, a system approaches continuity; examples include a string or the surface of a body of water. Such systems have (in the classical limit) an infinite number of normal modes and their oscillations occur in the form of waves that can characteristically propagate.
The mathematics of oscillation deals with the quantification of the amount that a sequence or function tends to move between extremes. There are several related notions: oscillation of a sequence of real numbers, oscillation of a real-valued function at a point, and oscillation of a function on an interval (or open set).
In classical mechanics, a harmonic oscillator is a system that, when displaced from its equilibrium position, experiences a restoring force F proportional to the displacement x:
In mechanics and physics, simple harmonic motion is a special type of periodic motion an object experiences due to a restoring force whose magnitude is directly proportional to the distance of the object from an equilibrium position and acts towards the equilibrium position. It results in an oscillation that is described by a sinusoid which continues indefinitely.
Resonance is the phenomenon, pertaining to oscillatory dynamical systems, wherein amplitude rises are caused by an external force with time-varying amplitude with the same frequency of variation as the natural frequency of the system. The amplitude rises that occur are a result of the fact that applied external forces at the natural frequency entail a net increase in mechanical energy of the system.
The quantum harmonic oscillator is the quantum-mechanical analog of the classical harmonic oscillator. Because an arbitrary smooth potential can usually be approximated as a harmonic potential at the vicinity of a stable equilibrium point, it is one of the most important model systems in quantum mechanics. Furthermore, it is one of the few quantum-mechanical systems for which an exact, analytical solution is known.
A phonon is a collective excitation in a periodic, elastic arrangement of atoms or molecules in condensed matter, specifically in solids and some liquids. A type of quasiparticle in physics, a phonon is an excited state in the quantum mechanical quantization of the modes of vibrations for elastic structures of interacting particles. Phonons can be thought of as quantized sound waves, similar to photons as quantized light waves.
A normal mode of a dynamical system is a pattern of motion in which all parts of the system move sinusoidally with the same frequency and with a fixed phase relation. The free motion described by the normal modes takes place at fixed frequencies. These fixed frequencies of the normal modes of a system are known as its natural frequencies or resonant frequencies. A physical object, such as a building, bridge, or molecule, has a set of normal modes and their natural frequencies that depend on its structure, materials and boundary conditions.
The Newmark-beta method is a method of numerical integration used to solve certain differential equations. It is widely used in numerical evaluation of the dynamic response of structures and solids such as in finite element analysis to model dynamic systems. The method is named after Nathan M. Newmark, former Professor of Civil Engineering at the University of Illinois at Urbana–Champaign, who developed it in 1959 for use in structural dynamics. The semi-discretized structural equation is a second order ordinary differential equation system,
In physical systems, damping is the loss of energy of an oscillating system by dissipation. Damping is an influence within or upon an oscillatory system that has the effect of reducing or preventing its oscillation. Examples of damping include viscous damping in a fluid, surface friction, radiation, resistance in electronic oscillators, and absorption and scattering of light in optical oscillators. Damping not based on energy loss can be important in other oscillating systems such as those that occur in biological systems and bikes. Damping is not to be confused with friction, which is a type of dissipative force acting on a system. Friction can cause or be a factor of damping.
In physics, a ponderomotive force is a nonlinear force that a charged particle experiences in an inhomogeneous oscillating electromagnetic field. It causes the particle to move towards the area of the weaker field strength, rather than oscillating around an initial point as happens in a homogeneous field. This occurs because the particle sees a greater magnitude of force during the half of the oscillation period while it is in the area with the stronger field. The net force during its period in the weaker area in the second half of the oscillation does not offset the net force of the first half, and so over a complete cycle this makes the particle move towards the area of lesser force.
The Duffing equation, named after Georg Duffing (1861–1944), is a non-linear second-order differential equation used to model certain damped and driven oscillators. The equation is given by
In classical mechanics, anharmonicity is the deviation of a system from being a harmonic oscillator. An oscillator that is not oscillating in harmonic motion is known as an anharmonic oscillator where the system can be approximated to a harmonic oscillator and the anharmonicity can be calculated using perturbation theory. If the anharmonicity is large, then other numerical techniques have to be used. In reality all oscillating systems are anharmonic, but most approximate the harmonic oscillator the smaller the amplitude of the oscillation is.
In mathematics, more specifically in dynamical systems, the method of averaging exploits systems containing time-scales separation: a fast oscillationversus a slow drift. It suggests that we perform an averaging over a given amount of time in order to iron out the fast oscillations and observe the qualitative behavior from the resulting dynamics. The approximated solution holds under finite time inversely proportional to the parameter denoting the slow time scale. It turns out to be a customary problem where there exists the trade off between how good is the approximated solution balanced by how much time it holds to be close to the original solution.
A parametric oscillator is a driven harmonic oscillator in which the oscillations are driven by varying some parameters of the system at some frequencies, typically different from the natural frequency of the oscillator. A simple example of a parametric oscillator is a child pumping a playground swing by periodically standing and squatting to increase the size of the swing's oscillations. The child's motions vary the moment of inertia of the swing as a pendulum. The "pump" motions of the child must be at twice the frequency of the swing's oscillations. Examples of parameters that may be varied are the oscillator's resonance frequency and damping .
The Rabi problem concerns the response of an atom to an applied harmonic electric field, with an applied frequency very close to the atom's natural frequency. It provides a simple and generally solvable example of light–atom interactions and is named after Isidor Isaac Rabi.
In classical mechanics, Bertrand's theorem states that among central-force potentials with bound orbits, there are only two types of central-force (radial) scalar potentials with the property that all bound orbits are also closed orbits.
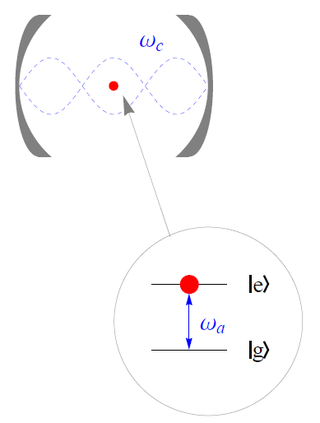
The Jaynes–Cummings model is a theoretical model in quantum optics. It describes the system of a two-level atom interacting with a quantized mode of an optical cavity, with or without the presence of light. It was originally developed to study the interaction of atoms with the quantized electromagnetic field in order to investigate the phenomena of spontaneous emission and absorption of photons in a cavity.
A pendulum is a body suspended from a fixed support so that it swings freely back and forth under the influence of gravity. When a pendulum is displaced sideways from its resting, equilibrium position, it is subject to a restoring force due to gravity that will accelerate it back towards the equilibrium position. When released, the restoring force acting on the pendulum's mass causes it to oscillate about the equilibrium position, swinging it back and forth. The mathematics of pendulums are in general quite complicated. Simplifying assumptions can be made, which in the case of a simple pendulum allow the equations of motion to be solved analytically for small-angle oscillations.
In perturbation theory, the Poincaré–Lindstedt method or Lindstedt–Poincaré method is a technique for uniformly approximating periodic solutions to ordinary differential equations, when regular perturbation approaches fail. The method removes secular terms—terms growing without bound—arising in the straightforward application of perturbation theory to weakly nonlinear problems with finite oscillatory solutions.
Vibration is a mechanical phenomenon whereby oscillations occur about an equilibrium point. Vibration may be deterministic if the oscillations can be characterised precisely, or random if the oscillations can only be analysed statistically.
Kapitza's pendulum or Kapitza pendulum is a rigid pendulum in which the pivot point vibrates in a vertical direction, up and down. It is named after Russian Nobel laureate physicist Pyotr Kapitza, who in 1951 developed a theory which successfully explains some of its unusual properties. The unique feature of the Kapitza pendulum is that the vibrating suspension can cause it to balance stably in an inverted position, with the bob above the suspension point. In the usual pendulum with a fixed suspension, the only stable equilibrium position is with the bob hanging below the suspension point; the inverted position is a point of unstable equilibrium, and the smallest perturbation moves the pendulum out of equilibrium. In nonlinear control theory the Kapitza pendulum is used as an example of a parametric oscillator that demonstrates the concept of "dynamic stabilization".
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.