
In computer science, binary search, also known as half-interval search, logarithmic search, or binary chop, is a search algorithm that finds the position of a target value within a sorted array. Binary search compares the target value to the middle element of the array. If they are not equal, the half in which the target cannot lie is eliminated and the search continues on the remaining half, again taking the middle element to compare to the target value, and repeating this until the target value is found. If the search ends with the remaining half being empty, the target is not in the array.

In computing, a hash table, also known as a hash map or a hash set, is a data structure that implements an associative array, also called a dictionary, which is an abstract data type that maps keys to values. A hash table uses a hash function to compute an index, also called a hash code, into an array of buckets or slots, from which the desired value can be found. During lookup, the key is hashed and the resulting hash indicates where the corresponding value is stored.
In computer science, heapsort is a comparison-based sorting algorithm which can be thought of as "an implementation of selection sort using the right data structure." Like selection sort, heapsort divides its input into a sorted and an unsorted region, and it iteratively shrinks the unsorted region by extracting the largest element from it and inserting it into the sorted region. Unlike selection sort, heapsort does not waste time with a linear-time scan of the unsorted region; rather, heap sort maintains the unsorted region in a heap data structure to efficiently find the largest element in each step.

In computer science, a heap is a tree-based data structure that satisfies the heap property: In a max heap, for any given node C, if P is a parent node of C, then the key of P is greater than or equal to the key of C. In a min heap, the key of P is less than or equal to the key of C. The node at the "top" of the heap is called the root node.
Insertion sort is a simple sorting algorithm that builds the final sorted array (or list) one item at a time by comparisons. It is much less efficient on large lists than more advanced algorithms such as quicksort, heapsort, or merge sort. However, insertion sort provides several advantages:
In computer science, a priority queue is an abstract data-type similar to a regular queue or stack data structure. Each element in a priority queue has an associated priority. In a priority queue, elements with high priority are served before elements with low priority. In some implementations, if two elements have the same priority, they are served in the same order in which they were enqueued. In other implementations, the order of elements with the same priority is undefined.
In computer science, radix sort is a non-comparative sorting algorithm. It avoids comparison by creating and distributing elements into buckets according to their radix. For elements with more than one significant digit, this bucketing process is repeated for each digit, while preserving the ordering of the prior step, until all digits have been considered. For this reason, radix sort has also been called bucket sort and digital sort.
In computer science, a sorting algorithm is an algorithm that puts elements of a list into an order. The most frequently used orders are numerical order and lexicographical order, and either ascending or descending. Efficient sorting is important for optimizing the efficiency of other algorithms that require input data to be in sorted lists. Sorting is also often useful for canonicalizing data and for producing human-readable output.
In computer science, selection sort is an in-place comparison sorting algorithm. It has an O(n2) time complexity, which makes it inefficient on large lists, and generally performs worse than the similar insertion sort. Selection sort is noted for its simplicity and has performance advantages over more complicated algorithms in certain situations, particularly where auxiliary memory is limited.

Bucket sort, or bin sort, is a sorting algorithm that works by distributing the elements of an array into a number of buckets. Each bucket is then sorted individually, either using a different sorting algorithm, or by recursively applying the bucket sorting algorithm. It is a distribution sort, a generalization of pigeonhole sort that allows multiple keys per bucket, and is a cousin of radix sort in the most-to-least significant digit flavor. Bucket sort can be implemented with comparisons and therefore can also be considered a comparison sort algorithm. The computational complexity depends on the algorithm used to sort each bucket, the number of buckets to use, and whether the input is uniformly distributed.
In computer science, counting sort is an algorithm for sorting a collection of objects according to keys that are small positive integers; that is, it is an integer sorting algorithm. It operates by counting the number of objects that possess distinct key values, and applying prefix sum on those counts to determine the positions of each key value in the output sequence. Its running time is linear in the number of items and the difference between the maximum key value and the minimum key value, so it is only suitable for direct use in situations where the variation in keys is not significantly greater than the number of items. It is often used as a subroutine in radix sort, another sorting algorithm, which can handle larger keys more efficiently.
Spreadsort is a sorting algorithm invented by Steven J. Ross in 2002. It combines concepts from distribution-based sorts, such as radix sort and bucket sort, with partitioning concepts from comparison sorts such as quicksort and mergesort. In experimental results it was shown to be highly efficient, often outperforming traditional algorithms such as quicksort, particularly on distributions exhibiting structure and string sorting. There is an open-source implementation with performance analysis and benchmarks, and HTML documentation .
An American flag sort is an efficient, in-place variant of radix sort that distributes items into buckets. Non-comparative sorting algorithms such as radix sort and American flag sort are typically used to sort large objects such as strings, for which comparison is not a unit-time operation. American flag sort iterates through the bits of the objects, considering several bits of each object at a time. For each set of bits, American flag sort makes two passes through the array of objects: first to count the number of objects that will fall in each bin, and second to place each object in its bucket. This works especially well when sorting a byte at a time, using 256 buckets. With some optimizations, it is twice as fast as quicksort for large sets of strings.
Flashsort is a distribution sorting algorithm showing linear computational complexity O(n) for uniformly distributed data sets and relatively little additional memory requirement. The original work was published in 1998 by Karl-Dietrich Neubert.
Samplesort is a sorting algorithm that is a divide and conquer algorithm often used in parallel processing systems. Conventional divide and conquer sorting algorithms partitions the array into sub-intervals or buckets. The buckets are then sorted individually and then concatenated together. However, if the array is non-uniformly distributed, the performance of these sorting algorithms can be significantly throttled. Samplesort addresses this issue by selecting a sample of size s from the n-element sequence, and determining the range of the buckets by sorting the sample and choosing p−1 < s elements from the result. These elements then divide the array into p approximately equal-sized buckets. Samplesort is described in the 1970 paper, "Samplesort: A Sampling Approach to Minimal Storage Tree Sorting", by W. D. Frazer and A. C. McKellar.
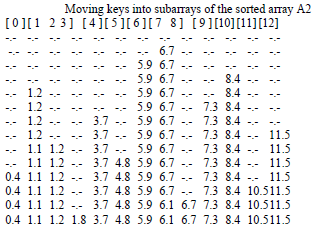
ProxmapSort, or Proxmap sort, is a sorting algorithm that works by partitioning an array of data items, or keys, into a number of "subarrays". The name is short for computing a "proximity map," which indicates for each key K the beginning of a subarray where K will reside in the final sorted order. Keys are placed into each subarray using insertion sort. If keys are "well distributed" among the subarrays, sorting occurs in linear time. The computational complexity estimates involve the number of subarrays and the proximity mapping function, the "map key," used. It is a form of bucket and radix sort.
In computer science, integer sorting is the algorithmic problem of sorting a collection of data values by integer keys. Algorithms designed for integer sorting may also often be applied to sorting problems in which the keys are floating point numbers, rational numbers, or text strings. The ability to perform integer arithmetic on the keys allows integer sorting algorithms to be faster than comparison sorting algorithms in many cases, depending on the details of which operations are allowed in the model of computing and how large the integers to be sorted are.
In computer science, k-way merge algorithms or multiway merges are a specific type of sequence merge algorithms that specialize in taking in k sorted lists and merging them into a single sorted list. These merge algorithms generally refer to merge algorithms that take in a number of sorted lists greater than two. Two-way merges are also referred to as binary merges.The k- way merge is also an external sorting algorithm.

A bucket queue is a data structure that implements the priority queue abstract data type: it maintains a dynamic collection of elements with numerical priorities and allows quick access to the element with minimum priority. In the bucket queue, the priorities must be integers, and it is particularly suited to applications in which the priorities have a small range. A bucket queue has the form of an array of buckets: an array data structure, indexed by the priorities, whose cells contain collections of items with the same priority as each other. With this data structure, insertion of elements and changes of their priority take constant time. Searching for and removing the minimum-priority element takes time proportional to the number of buckets or, by maintaining a pointer to the most recently found bucket, in time proportional to the difference in priorities between successive operations.
Interpolation sort is a sorting algorithm that is a kind of bucket sort. It uses an interpolation formula to assign data to the bucket. A general interpolation formula is:

