In computer science, heapsort is a comparison-based sorting algorithm which can be thought of as "an implementation of selection sort using the right data structure." Like selection sort, heapsort divides its input into a sorted and an unsorted region, and it iteratively shrinks the unsorted region by extracting the largest element from it and inserting it into the sorted region. Unlike selection sort, heapsort does not waste time with a linear-time scan of the unsorted region; rather, heap sort maintains the unsorted region in a heap data structure to efficiently find the largest element in each step.

In computer science, a heap is a tree-based data structure that satisfies the heap property: In a max heap, for any given node C, if P is a parent node of C, then the key of P is greater than or equal to the key of C. In a min heap, the key of P is less than or equal to the key of C. The node at the "top" of the heap is called the root node.

In computer science, merge sort is an efficient, general-purpose, and comparison-based sorting algorithm. Most implementations produce a stable sort, which means that the relative order of equal elements is the same in the input and output. Merge sort is a divide-and-conquer algorithm that was invented by John von Neumann in 1945. A detailed description and analysis of bottom-up merge sort appeared in a report by Goldstine and von Neumann as early as 1948.
In computer science, radix sort is a non-comparative sorting algorithm. It avoids comparison by creating and distributing elements into buckets according to their radix. For elements with more than one significant digit, this bucketing process is repeated for each digit, while preserving the ordering of the prior step, until all digits have been considered. For this reason, radix sort has also been called bucket sort and digital sort.
In computer science, a sorting algorithm is an algorithm that puts elements of a list into an order. The most frequently used orders are numerical order and lexicographical order, and either ascending or descending. Efficient sorting is important for optimizing the efficiency of other algorithms that require input data to be in sorted lists. Sorting is also often useful for canonicalizing data and for producing human-readable output.

Shellsort, also known as Shell sort or Shell's method, is an in-place comparison sort. It can be seen as either a generalization of sorting by exchange or sorting by insertion. The method starts by sorting pairs of elements far apart from each other, then progressively reducing the gap between elements to be compared. By starting with far-apart elements, it can move some out-of-place elements into the position faster than a simple nearest-neighbor exchange. Donald Shell published the first version of this sort in 1959. The running time of Shellsort is heavily dependent on the gap sequence it uses. For many practical variants, determining their time complexity remains an open problem.

Bucket sort, or bin sort, is a sorting algorithm that works by distributing the elements of an array into a number of buckets. Each bucket is then sorted individually, either using a different sorting algorithm, or by recursively applying the bucket sorting algorithm. It is a distribution sort, a generalization of pigeonhole sort that allows multiple keys per bucket, and is a cousin of radix sort in the most-to-least significant digit flavor. Bucket sort can be implemented with comparisons and therefore can also be considered a comparison sort algorithm. The computational complexity depends on the algorithm used to sort each bucket, the number of buckets to use, and whether the input is uniformly distributed.
The Cooley–Tukey algorithm, named after J. W. Cooley and John Tukey, is the most common fast Fourier transform (FFT) algorithm. It re-expresses the discrete Fourier transform (DFT) of an arbitrary composite size in terms of N1 smaller DFTs of sizes N2, recursively, to reduce the computation time to O(N log N) for highly composite N (smooth numbers). Because of the algorithm's importance, specific variants and implementation styles have become known by their own names, as described below.
Introsort or introspective sort is a hybrid sorting algorithm that provides both fast average performance and (asymptotically) optimal worst-case performance. It begins with quicksort, it switches to heapsort when the recursion depth exceeds a level based on (the logarithm of) the number of elements being sorted and it switches to insertion sort when the number of elements is below some threshold. This combines the good parts of the three algorithms, with practical performance comparable to quicksort on typical data sets and worst-case O(n log n) runtime due to the heap sort. Since the three algorithms it uses are comparison sorts, it is also a comparison sort.
In computer science, a selection algorithm is an algorithm for finding the th smallest value in a collection of ordered values, such as numbers. The value that it finds is called the th order statistic. Selection includes as special cases the problems of finding the minimum, median, and maximum element in the collection. Selection algorithms include quickselect, and the median of medians algorithm. When applied to a collection of values, these algorithms take linear time, as expressed using big O notation. For data that is already structured, faster algorithms may be possible; as an extreme case, selection in an already-sorted array takes time .
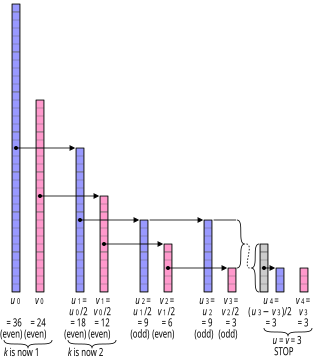
The binary GCD algorithm, also known as Stein's algorithm or the binary Euclidean algorithm, is an algorithm that computes the greatest common divisor (GCD) of two nonnegative integers. Stein's algorithm uses simpler arithmetic operations than the conventional Euclidean algorithm; it replaces division with arithmetic shifts, comparisons, and subtraction.

A comparison sort is a type of sorting algorithm that only reads the list elements through a single abstract comparison operation that determines which of two elements should occur first in the final sorted list. The only requirement is that the operator forms a total preorder over the data, with:
- if a ≤ b and b ≤ c then a ≤ c (transitivity)
- for all a and b, a ≤ b or b ≤ a (connexity).

Quicksort is an efficient, general-purpose sorting algorithm. Quicksort was developed by British computer scientist Tony Hoare in 1959 and published in 1961. It is still a commonly used algorithm for sorting. Overall, it is slightly faster than merge sort and heapsort for randomized data, particularly on larger distributions.
sort is a generic function in the C++ Standard Library for doing comparison sorting. The function originated in the Standard Template Library (STL).
An American flag sort is an efficient, in-place variant of radix sort that distributes items into buckets. Non-comparative sorting algorithms such as radix sort and American flag sort are typically used to sort large objects such as strings, for which comparison is not a unit-time operation. American flag sort iterates through the bits of the objects, considering several bits of each object at a time. For each set of bits, American flag sort makes two passes through the array of objects: first to count the number of objects that will fall in each bin, and second to place each object in its bucket. This works especially well when sorting a byte at a time, using 256 buckets. With some optimizations, it is twice as fast as quicksort for large sets of strings.
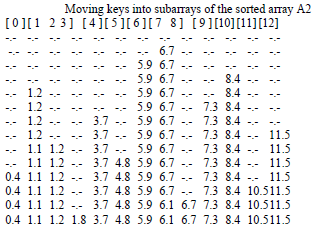
ProxmapSort, or Proxmap sort, is a sorting algorithm that works by partitioning an array of data items, or keys, into a number of "subarrays". The name is short for computing a "proximity map," which indicates for each key K the beginning of a subarray where K will reside in the final sorted order. Keys are placed into each subarray using insertion sort. If keys are "well distributed" among the subarrays, sorting occurs in linear time. The computational complexity estimates involve the number of subarrays and the proximity mapping function, the "map key," used. It is a form of bucket and radix sort.
In computer science, partial sorting is a relaxed variant of the sorting problem. Total sorting is the problem of returning a list of items such that its elements all appear in order, while partial sorting is returning a list of the k smallest elements in order. The other elements may also be sorted, as in an in-place partial sort, or may be discarded, which is common in streaming partial sorts. A common practical example of partial sorting is computing the "Top 100" of some list.
Interpolation sort is a sorting algorithm that is a kind of bucket sort. It uses an interpolation formula to assign data to the bucket. A general interpolation formula is:
Proportion extend sort is an in-place, comparison-based sorting algorithm which attempts to improve on the performance, particularly the worst-case performance, of quicksort.