
A central processing unit (CPU)—also called a central processor or main processor—is the most important processor in a given computer. Its electronic circuitry executes instructions of a computer program, such as arithmetic, logic, controlling, and input/output (I/O) operations. This role contrasts with that of external components, such as main memory and I/O circuitry, and specialized coprocessors such as graphics processing units (GPUs).
The control unit (CU) is a component of a computer's central processing unit (CPU) that directs the operation of the processor. A CU typically uses a binary decoder to convert coded instructions into timing and control signals that direct the operation of the other units.
In computing, the instruction register (IR) or current instruction register (CIR) is the part of a CPU's control unit that holds the instruction currently being executed or decoded. In simple processors, each instruction to be executed is loaded into the instruction register, which holds it while it is decoded, prepared and ultimately executed, which can take several steps.
In computer engineering, instruction pipelining is a technique for implementing instruction-level parallelism within a single processor. Pipelining attempts to keep every part of the processor busy with some instruction by dividing incoming instructions into a series of sequential steps performed by different processor units with different parts of instructions processed in parallel.
In the domain of central processing unit (CPU) design, hazards are problems with the instruction pipeline in CPU microarchitectures when the next instruction cannot execute in the following clock cycle, and can potentially lead to incorrect computation results. Three common types of hazards are data hazards, structural hazards, and control hazards.
In the history of computer hardware, some early reduced instruction set computer central processing units used a very similar architectural solution, now called a classic RISC pipeline. Those CPUs were: MIPS, SPARC, Motorola 88000, and later the notional CPU DLX invented for education.
In computer architecture, register renaming is a technique that abstracts logical registers from physical registers. Every logical register has a set of physical registers associated with it. When a machine language instruction refers to a particular logical register, the processor transposes this name to one specific physical register on the fly. The physical registers are opaque and cannot be referenced directly but only via the canonical names.
In computer science, computer engineering and programming language implementations, a stack machine is a computer processor or a virtual machine in which the primary interaction is moving short-lived temporary values to and from a push down stack. In the case of a hardware processor, a hardware stack is used. The use of a stack significantly reduces the required number of processor registers. Stack machines extend push-down automata with additional load/store operations or multiple stacks and hence are Turing-complete.

The instruction cycle is the cycle that the central processing unit (CPU) follows from boot-up until the computer has shut down in order to process instructions. It is composed of three main stages: the fetch stage, the decode stage, and the execute stage.
Addressing modes are an aspect of the instruction set architecture in most central processing unit (CPU) designs. The various addressing modes that are defined in a given instruction set architecture define how the machine language instructions in that architecture identify the operand(s) of each instruction. An addressing mode specifies how to calculate the effective memory address of an operand by using information held in registers and/or constants contained within a machine instruction or elsewhere.

The CDC STAR-100 is a vector supercomputer that was designed, manufactured, and marketed by Control Data Corporation (CDC). It was one of the first machines to use a vector processor to improve performance on appropriate scientific applications. It was also the first supercomputer to use integrated circuits and the first to be equipped with one million words of computer memory.
In computer engineering, out-of-order execution is a paradigm used in most high-performance central processing units to make use of instruction cycles that would otherwise be wasted. In this paradigm, a processor executes instructions in an order governed by the availability of input data and execution units, rather than by their original order in a program. In doing so, the processor can avoid being idle while waiting for the preceding instruction to complete and can, in the meantime, process the next instructions that are able to run immediately and independently.
In software engineering, a pipeline consists of a chain of processing elements, arranged so that the output of each element is the input of the next; the name is by analogy to a physical pipeline. Usually some amount of buffering is provided between consecutive elements. The information that flows in these pipelines is often a stream of records, bytes, or bits, and the elements of a pipeline may be called filters; this is also called the pipe(s) and filters design pattern. Connecting elements into a pipeline is analogous to function composition.

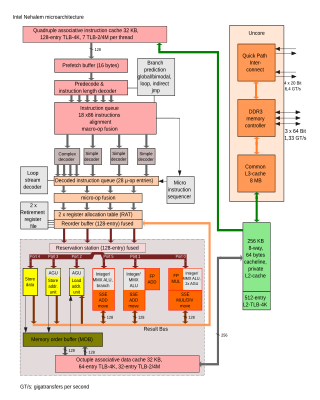
In electronics, computer science and computer engineering, microarchitecture, also called computer organization and sometimes abbreviated as µarch or uarch, is the way a given instruction set architecture (ISA) is implemented in a particular processor. A given ISA may be implemented with different microarchitectures; implementations may vary due to different goals of a given design or due to shifts in technology.
In computer architecture, a transport triggered architecture (TTA) is a kind of processor design in which programs directly control the internal transport buses of a processor. Computation happens as a side effect of data transports: writing data into a triggering port of a functional unit triggers the functional unit to start a computation. This is similar to what happens in a systolic array. Due to its modular structure, TTA is an ideal processor template for application-specific instruction set processors (ASIP) with customized datapath but without the inflexibility and design cost of fixed function hardware accelerators.
A unified reservation station, also known as unified scheduler, is a decentralized feature of the microarchitecture of a CPU that allows for register renaming, and is used by the Tomasulo algorithm for dynamic instruction scheduling.
In the design of pipelined computer processors, a pipeline stall is a delay in execution of an instruction in order to resolve a hazard.

In computer architecture, multithreading is the ability of a central processing unit (CPU) to provide multiple threads of execution concurrently, supported by the operating system. This approach differs from multiprocessing. In a multithreaded application, the threads share the resources of a single or multiple cores, which include the computing units, the CPU caches, and the translation lookaside buffer (TLB).

In computing, an arithmetic logic unit (ALU) is a combinational digital circuit that performs arithmetic and bitwise operations on integer binary numbers. This is in contrast to a floating-point unit (FPU), which operates on floating point numbers. It is a fundamental building block of many types of computing circuits, including the central processing unit (CPU) of computers, FPUs, and graphics processing units (GPUs).
Latency oriented processor architecture is the microarchitecture of a microprocessor designed to serve a serial computing thread with a low latency. This is typical of most central processing units (CPU) being developed since the 1970s. These architectures, in general, aim to execute as many instructions as possible belonging to a single serial thread, in a given window of time; however, the time to execute a single instruction completely from fetch to retire stages may vary from a few cycles to even a few hundred cycles in some cases. Latency oriented processor architectures are the opposite of throughput-oriented processors which concern themselves more with the total throughput of the system, rather than the service latencies for all individual threads that they work on.