RoboCup is an annual international robotics competition proposed and founded in 1996 by a group of university professors. The aim of the competition is to promote robotics and AI research by offering a publicly appealing – but formidable – challenge.
RoboCup Junior (RCJ), sometimes stylised RobocupJunior, is a division of RoboCup, a not-for-profit robotics organisation. It focuses on education and aims to introduce the larger goals of the RoboCup project to primary and secondary school aged children. Participants compete in one of three main leagues: Soccer, Rescue or Dance. Dance Theatre also exists as a sub-league of Dance, and Premier Rescue is part of the competition in Australia and New Zealand.

As one of the founding leagues of the international RoboCup initiative, the RoboCup Middle Size League (MSL) robot soccer competition has been organised from 1997 onwards. On an indoor soccer field, with goals of reduced size, teams of five fully autonomous soccer playing robots compete against one another. No human intervention is allowed during a match, except to take robots on or from the field. Although limitations with respect to maximum size and weight are in place, teams are completely free to design both hardware and software.

The RoboCup Simulation League is one of five soccer leagues within the RoboCup initiative.

The Hamilton Institute is a multi-disciplinary research centre at Maynooth University, named after William Rowan Hamilton, arguably Ireland's most distinguished mathematician.

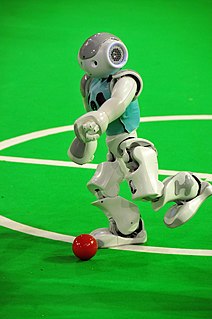
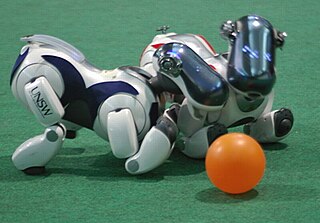
NAO is an autonomous, programmable humanoid robot developed by Aldebaran Robotics, a French robotics company headquartered in Paris, which was acquired by SoftBank Group in 2015 and rebranded as SoftBank Robotics. The robot's development began with the launch of Project Nao in 2004. On 15 August 2007, Nao replaced Sony's robot dog Aibo as the robot used in the RoboCup Standard Platform League (SPL), an international robot soccer competition. The Nao was used in RoboCup 2008 and 2009, and the NaoV3R was chosen as the platform for the SPL at RoboCup 2010.
The UNSW School of Computer Science and Engineering (CSE), is part of the UNSW Faculty of Engineering and was founded in 1991 out of the former Department of Computer Science within the School of Electrical Engineering and Computer Science. It is the highest ranked and largest School of its kind in Australia. The academic staff have research focus in areas such as Artificial Intelligence, Biomedical Image Computing, Data Knowledge, Embedded Systems, Networked Systems and Security, Programming Languages and Compilers, Service Oriented Computing, Theoretical Computer Science and Trustworthy Systems.
Robocup Rescue Simulation is an education and research project intended to promote the development of robotic agents for search and rescue. The project was initiated in reaction to the Great Hanshin earthquake, which hit Hyōgo Prefecture, Japan, on 17 January 1995, killing more than six thousand people, most of them in the city of Kobe.
Bellarine Secondary College is a multi-campus school on the Bellarine Peninsula, Australia. The college consists of 2 campuses, one in Ocean Grove, and the main campus in Drysdale. The larger and main campus in Drysdale holds the students in years 9, 10, 11 and 12, while the smaller Ocean Grove campus holds the students in Years 7 and 8. The Drysdale campus holds around 1000 approx. students, and the Ocean Grove campus accommodates around 400 students. It has a SEAL class, which means the students are able to do years 7–10 in 3, not 4 years. This also means that students have 3 years to do VCE, not 2.
The 2014 FIFA World Cup qualification was a series of tournaments organised by the six FIFA confederations. The 2014 FIFA World Cup featured 32 teams, with one place reserved for the host nation, Brazil. The remaining 31 places were determined by a qualification process, in which the other 207 teams, from the six FIFA confederations, competed. Most of the successful teams were determined within these confederations, with a limited number of inter-confederation play-offs occurring at the end of the process.
The RoboCup Standard Platform League (SPL) is one of several leagues within RoboCup, an international competition with autonomous robotic soccer matches as the main event.

The RoboCup 3D Simulated Soccer League allows software agents to control humanoid robots to compete against one another in a realistic simulation of the rules and physics of a game of soccer. The platform strives to reproduce the software programming challenges faced when building real physical robots for this purpose. In doing so, it helps research towards the RoboCup Federation's goal of developing a team of fully autonomous humanoid robots that can win against the human world soccer champion team in 2050.
Claude Sammut is a Professor of Computer Science and Engineering at the University of New South Wales and Head of the Artificial Intelligence Research Group. He was the UNSW node Director of the ARC Centre of Excellence for Autonomous Systems (CAS), a program manager for the Smart Internet Technology CRC and a member of the joint ARC/NH&MRC project on Thinking Systems.

DARwIn-OP is a miniature-humanoid robot platform developed and manufactured by Korean robot manufacturer Robotis in collaboration with Virginia Tech, Purdue University, and University of Pennsylvania. It is also supported by a $1.2 million NSF grant. DARwIn-OP has twenty degrees of freedom, each controlled by a DYNAMIXEL MX-28T servo motor.

The 2013–14 UEFA Europa League was the 43rd season of Europe's secondary club football tournament organised by UEFA, and the fifth season under its current title.
The 1997 RoboCup 2D Soccer Simulation League was the first RoboCup competition promoted in conjunction with International Joint Conference on Artificial Intelligence held in Nagoya, Japan, from 23 to 29 August 1997.
The 1998 Robocup 2D Soccer Simulation League was a simulated soccer competition contested in the 1st Annual RoboCup International Symposium, held in Paris, France.
Major League Soccer teams have participated in the CONCACAF Champions League each season since the tournament began its current format in 2008–09. Previously, MLS teams played in the CONCACAF Champions Cup. MLS may send up to five teams to the CONCACAF Champions League each season — up to four from the United States, and up to one from Canada.

Peter Stone is an American computer scientist who is the David Bruton Jr. Centennial Professor of Computer Science at the University of Texas at Austin. He is also an Alfred P. Sloan Research Fellow, Guggenheim Fellow, AAAI Fellow, and Fulbright Scholar.
The 2016–17 Turkish Cup is the 55th season of the Turkish Cup. Ziraat Bankası is the sponsor of the tournament, thus the sponsored name is Ziraat Turkish Cup. The winners will earn a berth in the group stage of the 2017–18 UEFA Europa League, and also qualify for the 2017 Turkish Super Cup.