The Atwood machine (or Atwood's machine) was invented in 1784 by the English mathematician George Atwood as a laboratory experiment to verify the mechanical laws of motion with constant acceleration. Atwood's machine is a common classroom demonstration used to illustrate principles of classical mechanics.
Contents
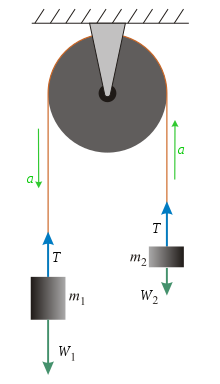
The ideal Atwood machine consists of two objects of mass m1 and m2, connected by an inextensible massless string over an ideal massless pulley. [1]
Both masses experience uniform acceleration. When m1 = m2, the machine is in neutral equilibrium regardless of the position of the weights.