The sound's source was roughly triangulated to 50°S100°W / 50°S 100°W / -50; -100, a remote point in the South Pacific Ocean west of the southern tip of South America. The sound was detected by the Equatorial Pacific Ocean autonomous hydrophone array,[1] a system of hydrophones primarily used to monitor undersea seismicity, ice noise, and marine mammal population and migration.[5]:284 This is a stand-alone system designed and built by NOAA's Pacific Marine Environmental Laboratory (PMEL) to augment NOAA's use of the U.S. Navy Sound Surveillance System (SOSUS), which was equipment originally designed to detect Sovietsubmarines.[5]:255–256
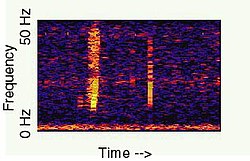
According to the NOAA description, the sound "rose" in frequency over about one minute and was of sufficient amplitude to be heard on multiple sensors, at a range of over 5,000km (3,000 miles).
Ice quake origin
The NOAA Vents Program has attributed the sound to that of a large cryoseism (also known as an ice quake).[4] Numerous ice quakes share similar spectrograms with Bloop, as well as the amplitude necessary to detect them despite ranges exceeding 5,000km (3,000 miles). This was found during the tracking of iceberg A53a as it disintegrated near South Georgia Island in early 2008. The iceberg(s) involved in generating the sound were most likely between Bransfield Strait and the Ross Sea; or possibly at Cape Adare, a well-known source of cryogenic signals.[1] Sounds generated by ice quakes are easily determined through the use of hydrophones since seawater, an excellent sound channel, allows the ambient sounds generated through ice activities to travel great distances.[6]:5
Ice calving
In ice calving, variations result from a sound source's motion.[6]:55 Icequakes, caused by the fracturing and movement of large ice masses, can produce powerful low-frequency sounds that propagate over vast distances in water. This mechanism could explain the Bloop's wide detection range and distinct acoustic signature.[7] As oceanographer Yunbo Xie explains, the alteration of waveforms from a detected sound "can also be caused by so-called angular frequency dependent radiation patterns associated with antisymmetric mode motion of the ice cover."[6]:59
Rubbing and ridging events within an ice floe
Two processes known as rubbing and ridging are responsible for acoustical emissions similar to those from ice calving.[8] Rubbing involves two or more areas of compacted glacial ice floes which are being forced together, inducing shear deformation at its edges and triggering horizontally-polarized shear waves, i. e. SH waves.[6]:137 Ridging occurs when that ice bends or slides at the ridges.[6]:121 According to Xie, both events will produce sound in the failure sequence (breakup) of an ice floe:
"A wave equation resulting from shear deformation will be defined in an ice floe with the rubbing effect coupled to the floe through its boundary with the adjacent ice,"[6]:137 while "ridging deformation(s) revealed by this event indicate that the failure process is associated with a crushing process that seals air or vacuous gaps between ice floes. The acoustical signals emitted by this failure process are similar to those emitted from a collapsing air bubble in a fluid."[6]:121
Animal origin
NOAA's Christopher Fox, in an interview with CNN in 2001, stated that he believed Bloop to be ice calving in Antarctica.[9] In 2002, Fox was interviewed by David Wolman for an article in New Scientist, where he stated that he did not believe its origin was man-made, such as a submarine or bomb. Fox also stated that while the audio profile of Bloop does resemble that of a living creature,[2] the source was a mystery because it would be "far more powerful than the calls made by any animal on Earth."[10] Wolman reported in his article the following:
Fox's hunch is that the sound nicknamed Bloop is the most likely (out of the other recorded unidentified sounds) to come from some sort of animal, because its signature is a rapid variation in frequency similar to that of sounds known to be made by marine beasts. There's one crucial difference, however: in 1997 Bloop was detected by sensors up to 4,800km (3,000 miles) apart. That means it must be far louder than any whale noise, or any other animal noise for that matter. Is it even remotely possible that some creature bigger than any whale is lurking in the ocean depths? Or, perhaps more likely, something that is much more efficient at making sound?[11]:174–175
—David Wolman
According to author Philip Hayward, Wolman's speculations "amplified Fox's 'hunch' and—through the use of the word 'likely'—opened the door for subsequent speculation as to what such an 'efficient' noise-making entity might be. Over the last decade, consensus has supported the argument that the noise is produced by ice fracturing processes."[11]:175
12US Department of Commerce, National Oceanic and Atmospheric Administration (June 25, 2018). "What is the Bloop?". oceanservice.noaa.gov. Archived from the original on May 7, 2019.
12Di Mento, John Mark (December 2006). "Environmental Challenges to Post-Cold War Naval Operations: The Browning of the Blue Water Battlespace". Beyond the Water's Edge: United States National Security & the Ocean Environment (Ph.D. thesis). Medford, MA: Fletcher School of Law and Diplomacy, Tufts University. Document No. 3262885 ProQuest304741876.
12Hayward, Philip (2017). Making a Splash: Mermaids (and Mer-Men) in 20th and 21st Century Audiovisual Media. Indiana University Press. ISBN9780861969258. OCLC1020857723.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.