In differential geometry, the Ricci curvature tensor, named after Gregorio Ricci-Curbastro, is a geometric object which is determined by a choice of Riemannian or pseudo-Riemannian metric on a manifold. It can be considered, broadly, as a measure of the degree to which the geometry of a given metric tensor differs locally from that of ordinary Euclidean space or pseudo-Euclidean space.
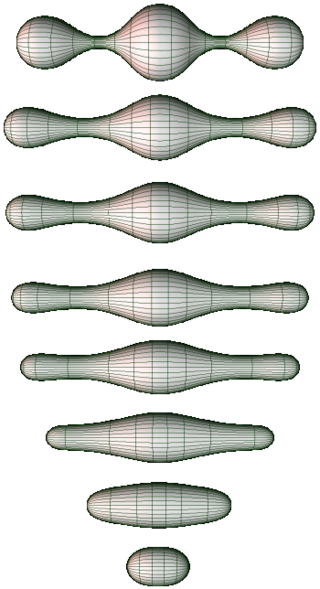
In the mathematical fields of differential geometry and geometric analysis, the Ricci flow, sometimes also referred to as Hamilton's Ricci flow, is a certain partial differential equation for a Riemannian metric. It is often said to be analogous to the diffusion of heat and the heat equation, due to formal similarities in the mathematical structure of the equation. However, it is nonlinear and exhibits many phenomena not present in the study of the heat equation.
In mathematics and especially differential geometry, a Kähler manifold is a manifold with three mutually compatible structures: a complex structure, a Riemannian structure, and a symplectic structure. The concept was first studied by Jan Arnoldus Schouten and David van Dantzig in 1930, and then introduced by Erich Kähler in 1933. The terminology has been fixed by André Weil. Kähler geometry refers to the study of Kähler manifolds, their geometry and topology, as well as the study of structures and constructions that can be performed on Kähler manifolds, such as the existence of special connections like Hermitian Yang–Mills connections, or special metrics such as Kähler–Einstein metrics.
In physics, Ginzburg–Landau theory, often called Landau–Ginzburg theory, named after Vitaly Ginzburg and Lev Landau, is a mathematical physical theory used to describe superconductivity. In its initial form, it was postulated as a phenomenological model which could describe type-I superconductors without examining their microscopic properties. One GL-type superconductor is the famous YBCO, and generally all cuprates.

In mathematics, contact geometry is the study of a geometric structure on smooth manifolds given by a hyperplane distribution in the tangent bundle satisfying a condition called 'complete non-integrability'. Equivalently, such a distribution may be given as the kernel of a differential one-form, and the non-integrability condition translates into a maximal non-degeneracy condition on the form. These conditions are opposite to two equivalent conditions for 'complete integrability' of a hyperplane distribution, i.e. that it be tangent to a codimension one foliation on the manifold, whose equivalence is the content of the Frobenius theorem.

In differential geometry, the holonomy of a connection on a smooth manifold is a general geometrical consequence of the curvature of the connection measuring the extent to which parallel transport around closed loops fails to preserve the geometrical data being transported. For flat connections, the associated holonomy is a type of monodromy and is an inherently global notion. For curved connections, holonomy has nontrivial local and global features.
In differential geometry, a hyperkähler manifold is a Riemannian manifold endowed with three integrable almost complex structures that are Kähler with respect to the Riemannian metric and satisfy the quaternionic relations . In particular, it is a hypercomplex manifold. All hyperkähler manifolds are Ricci-flat and are thus Calabi–Yau manifolds.
In differential geometry, a G2 manifold or Joyce manifold is a seven-dimensional Riemannian manifold with holonomy group contained in G2. The group is one of the five exceptional simple Lie groups. It can be described as the automorphism group of the octonions, or equivalently, as a proper subgroup of special orthogonal group SO(7) that preserves a spinor in the eight-dimensional spinor representation or lastly as the subgroup of the general linear group GL(7) which preserves the non-degenerate 3-form , the associative form. The Hodge dual, is then a parallel 4-form, the coassociative form. These forms are calibrations in the sense of Reese Harvey and H. Blaine Lawson, and thus define special classes of 3- and 4-dimensional submanifolds.
In differential geometry, a quaternion-Kähler manifold (or quaternionic Kähler manifold) is a Riemannian 4n-manifold whose Riemannian holonomy group is a subgroup of Sp(n)·Sp(1) for some . Here Sp(n) is the sub-group of consisting of those orthogonal transformations that arise by left-multiplication by some quaternionic matrix, while the group of unit-length quaternions instead acts on quaternionic -space by right scalar multiplication. The Lie group generated by combining these actions is then abstractly isomorphic to .
In mathematics, a Spin(7)-manifold is an eight-dimensional Riemannian manifold whose holonomy group is contained in Spin(7). Spin(7)-manifolds are Ricci-flat and admit a parallel spinor. They also admit a parallel 4-form, known as the Cayley form, which is a calibrating form for a special class of submanifolds called Cayley cycles.
In mathematics, specifically in symplectic geometry, the momentum map is a tool associated with a Hamiltonian action of a Lie group on a symplectic manifold, used to construct conserved quantities for the action. The momentum map generalizes the classical notions of linear and angular momentum. It is an essential ingredient in various constructions of symplectic manifolds, including symplectic (Marsden–Weinstein) quotients, discussed below, and symplectic cuts and sums.
In differential geometry, a hypercomplex manifold is a manifold with the tangent bundle equipped with an action by the algebra of quaternions in such a way that the quaternions define integrable almost complex structures.
In mathematics, the Wirtinger inequality, named after Wilhelm Wirtinger, is a fundamental result in complex linear algebra which relates the symplectic and volume forms of a hermitian inner product. It has important consequences in complex geometry, such as showing that the normalized exterior powers of the Kähler form of a Kähler manifold are calibrations.
In differential geometry, a -structure is an important type of G-structure that can be defined on a smooth manifold. If M is a smooth manifold of dimension seven, then a G2-structure is a reduction of structure group of the frame bundle of M to the compact, exceptional Lie group G2.
Spectral geometry is a field in mathematics which concerns relationships between geometric structures of manifolds and spectra of canonically defined differential operators. The case of the Laplace–Beltrami operator on a closed Riemannian manifold has been most intensively studied, although other Laplace operators in differential geometry have also been examined. The field concerns itself with two kinds of questions: direct problems and inverse problems.

Shoshichi Kobayashi was a Japanese mathematician. He was the eldest brother of electrical engineer and computer scientist Hisashi Kobayashi. His research interests were in Riemannian and complex manifolds, transformation groups of geometric structures, and Lie algebras.
In differential geometry, a constant scalar curvature Kähler metric is a Kähler metric on a complex manifold whose scalar curvature is constant. A special case is a Kähler–Einstein metric, and a more general case is an extremal Kähler metric.
Edmond Bonan (born 27 January 1937 in Haifa, Mandatory Palestine) is a French mathematician, known particularly for his work on special holonomy. Although not a single example of G2 manifold or Spin(7) manifold had been discovered until thirty years later, Edmond Bonan nonetheless made a useful contribution by showing in 1966, that such manifolds would carry at least a parallel 4-form, and would necessarily be Ricci-flat, propelling them as candidates for string theory.
In differential geometry, a quaternionic manifold is a quaternionic analog of a complex manifold. The definition is more complicated and technical than the one for complex manifolds due in part to the noncommutativity of the quaternions and in part to the lack of a suitable calculus of holomorphic functions for quaternions. The most succinct definition uses the language of G-structures on a manifold. Specifically, a quaternionic n-manifold can be defined as a smooth manifold of real dimension 4n equipped with a torsion-free -structure. More naïve, but straightforward, definitions lead to a dearth of examples, and exclude spaces like quaternionic projective space which should clearly be considered as quaternionic manifolds.

Sylvestre F. L. Gallot is a French mathematician, specializing in differential geometry. He is an emeritus professor at the Institut Fourier of the Université Grenoble Alpes, in the Geometry and Topology section.
