In mathematics, Cartan's equivalence method is a technique in differential geometry for determining whether two geometrical structures are the same up to a diffeomorphism. For example, if M and N are two Riemannian manifolds with metrics g and h, respectively, when is there a diffeomorphism

Mathematics includes the study of such topics as quantity, structure, space, and change.

Differential geometry is a mathematical discipline that uses the techniques of differential calculus, integral calculus, linear algebra and multilinear algebra to study problems in geometry. The theory of plane and space curves and surfaces in the three-dimensional Euclidean space formed the basis for development of differential geometry during the 18th century and the 19th century.

In mathematics, a diffeomorphism is an isomorphism of smooth manifolds. It is an invertible function that maps one differentiable manifold to another such that both the function and its inverse are smooth.
Contents

such that
- ?

Although the answer to this particular question was known in dimension 2 to Gauss and in higher dimensions to Christoffel and perhaps Riemann as well, Élie Cartan and his intellectual heirs developed a technique for answering similar questions for radically different geometric structures. (For example see the Cartan–Karlhede algorithm.)

Johann Carl Friedrich Gauss (; German: Gauß[ˈkaɐ̯l ˈfʁiːdʁɪç ˈɡaʊs]; Latin: Carolus Fridericus Gauss; was a German mathematician and physicist who made significant contributions to many fields in mathematics and sciences. Sometimes referred to as the Princeps mathematicorum and "the greatest mathematician since antiquity", Gauss had an exceptional influence in many fields of mathematics and science, and is ranked among history's most influential mathematicians.

Elwin Bruno Christoffel was a German mathematician and physicist. He introduced fundamental concepts of differential geometry, opening the way for the development of tensor calculus, which would later provide the mathematical basis for general relativity.
Élie Joseph Cartan, ForMemRS was an influential French mathematician who did fundamental work in the theory of Lie groups, differential systems, and differential geometry. He also made significant contributions to general relativity and indirectly to quantum mechanics. He is widely regarded as one of the greatest mathematicians of the twentieth century.
Cartan successfully applied his equivalence method to many such structures, including projective structures, CR structures, and complex structures, as well as ostensibly non-geometrical structures such as the equivalence of Lagrangians and ordinary differential equations. (His techniques were later developed more fully by many others, such as D. C. Spencer and Shiing-Shen Chern.)
In differential geometry, a complex manifold is a manifold with an atlas of charts to the open unit disk in Cn, such that the transition maps are holomorphic.

Lagrangian mechanics is a reformulation of classical mechanics, introduced by the Italian-French mathematician and astronomer Joseph-Louis Lagrange in 1788.
In mathematics, an ordinary differential equation (ODE) is a differential equation containing one or more functions of one independent variable and the derivatives of those functions. The term ordinary is used in contrast with the term partial differential equation which may be with respect to more than one independent variable.
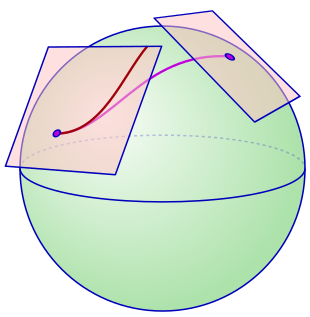
The equivalence method is an essentially algorithmic procedure for determining when two geometric structures are identical. For Cartan, the primary geometrical information was expressed in a coframe or collection of coframes on a differentiable manifold. See method of moving frames.

In mathematics and computer science, an algorithm is an unambiguous specification of how to solve a class of problems. Algorithms can perform calculation, data processing, automated reasoning, and other tasks.
In mathematics, a coframe or coframe field on a smooth manifold is a system of one-forms or covectors which form a basis of the cotangent bundle at every point. In the exterior algebra of , one has a natural map from , given by . If is dimensional a coframe is given by a section of such that . The inverse image under of the complement of the zero section of forms a principal bundle over , which is called the coframe bundle.

In mathematics, a differentiable manifold is a type of manifold that is locally similar enough to a linear space to allow one to do calculus. Any manifold can be described by a collection of charts, also known as an atlas. One may then apply ideas from calculus while working within the individual charts, since each chart lies within a linear space to which the usual rules of calculus apply. If the charts are suitably compatible, then computations done in one chart are valid in any other differentiable chart.