
In mathematics, a diffeomorphism is an isomorphism of smooth manifolds. It is an invertible function that maps one differentiable manifold to another such that both the function and its inverse are smooth.

In vector calculus, the gradient of a scalar-valued differentiable function f of several variables, , is the vector field, or more simply a vector-valued function , whose value at a point is the vector whose components are the partial derivatives of at :
In differential geometry, a (smooth) Riemannian manifold or (smooth) Riemannian space(M, g) is a real, smooth manifold M equipped with an inner product gp on the tangent space TpM at each point p that varies smoothly from point to point in the sense that if X and Y are differentiable vector fields on M, then p ↦ gp(X|p, Y|p) is a smooth function. The family gp of inner products is called a Riemannian metric. These terms are named after the German mathematician Bernhard Riemann. The study of Riemannian manifolds constitutes the subject called Riemannian geometry.
In vector calculus, the Jacobian matrix of a vector-valued function in several variables is the matrix of all its first-order partial derivatives. When this matrix is square, that is, when the function takes the same number of variables as input as the number of vector components of its output, its determinant is referred to as the Jacobian determinant. Both the matrix and the determinant are often referred to simply as the Jacobian in literature.
In the mathematical fields of differential geometry and tensor calculus, differential forms are an approach to multivariable calculus that is independent of coordinates. Differential forms provide a unified approach to define integrands over curves, surfaces, solids, and higher-dimensional manifolds. The modern notion of differential forms was pioneered by Élie Cartan. It has many applications, especially in geometry, topology and physics.

In mathematics, a vector bundle is a topological construction that makes precise the idea of a family of vector spaces parameterized by another space X : to every point x of the space X we associate a vector space V(x) in such a way that these vector spaces fit together to form another space of the same kind as X, which is then called a vector bundle over X.
In differential geometry, the Lie derivative, named after Sophus Lie by Władysław Ślebodziński, evaluates the change of a tensor field, along the flow defined by another vector field. This change is coordinate invariant and therefore the Lie derivative is defined on any differentiable manifold.
In mathematics, a frame bundle is a principal fiber bundle F(E) associated to any vector bundle E. The fiber of F(E) over a point x is the set of all ordered bases, or frames, for Ex. The general linear group acts naturally on F(E) via a change of basis, giving the frame bundle the structure of a principal GL(k, R)-bundle.
Suppose that φ : M → N is a smooth map between smooth manifolds M and N. Then there is an associated linear map from the space of 1-forms on N to the space of 1-forms on M. This linear map is known as the pullback, and is frequently denoted by φ∗. More generally, any covariant tensor field – in particular any differential form – on N may be pulled back to M using φ.
In mathematics, the Schwarzian derivative, named after the German mathematician Hermann Schwarz, is a certain operator that is invariant under all Möbius transformations. Thus, it occurs in the theory of the complex projective line, and in particular, in the theory of modular forms and hypergeometric functions. It plays an important role in the theory of univalent functions, conformal mapping and Teichmüller spaces.
In the branch of mathematics called differential geometry, an affine connection is a geometric object on a smooth manifold which connects nearby tangent spaces, so it permits tangent vector fields to be differentiated as if they were functions on the manifold with values in a fixed vector space. The notion of an affine connection has its roots in 19th-century geometry and tensor calculus, but was not fully developed until the early 1920s, by Élie Cartan and Hermann Weyl. The terminology is due to Cartan and has its origins in the identification of tangent spaces in Euclidean space Rn by translation: the idea is that a choice of affine connection makes a manifold look infinitesimally like Euclidean space not just smoothly, but as an affine space.
In mathematics, a homogeneous function is one with multiplicative scaling behaviour: if all its arguments are multiplied by a factor, then its value is multiplied by some power of this factor.
In differential geometry, a G-structure on an n-manifold M, for a given structure group G, is a G-subbundle of the tangent frame bundle FM of M.
In mathematics, the jet is an operation that takes a differentiable function f and produces a polynomial, the truncated Taylor polynomial of f, at each point of its domain. Although this is the definition of a jet, the theory of jets regards these polynomials as being abstract polynomials rather than polynomial functions.

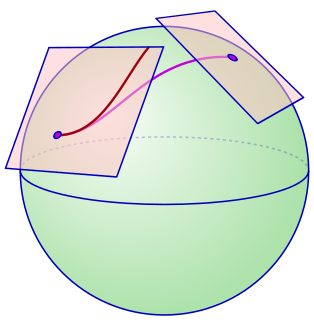
In differential geometry, pushforward is a linear approximation of smooth maps on tangent spaces. Suppose that φ : M → N is a smooth map between smooth manifolds; then the differential of φ at a point x is, in some sense, the best linear approximation of φ near x. It can be viewed as a generalization of the total derivative of ordinary calculus. Explicitly, it is a linear map from the tangent space of M at x to the tangent space of N at φ(x). Hence it can be used to push tangent vectors on Mforward to tangent vectors on N. The differential of a map φ is also called, by various authors, the derivative or total derivative of φ.

In mathematics, a differentiable manifold is a type of manifold that is locally similar enough to a linear space to allow one to do calculus. Any manifold can be described by a collection of charts, also known as an atlas. One may then apply ideas from calculus while working within the individual charts, since each chart lies within a linear space to which the usual rules of calculus apply. If the charts are suitably compatible, then computations done in one chart are valid in any other differentiable chart.
In the field of mathematics known as differential geometry, a generalized complex structure is a property of a differential manifold that includes as special cases a complex structure and a symplectic structure. Generalized complex structures were introduced by Nigel Hitchin in 2002 and further developed by his students Marco Gualtieri and Gil Cavalcanti.
In mathematics and theoretical physics, an invariant differential operator is a kind of mathematical map from some objects to an object of similar type. These objects are typically functions on , functions on a manifold, vector valued functions, vector fields, or, more generally, sections of a vector bundle.
In physics, general covariant transformations are symmetries of gravitation theory on a world manifold . They are gauge transformations whose parameter functions are vector fields on . From the physical viewpoint, general covariant transformations are treated as particular (holonomic) reference frame transformations in general relativity. In mathematics, general covariant transformations are defined as particular automorphisms of so-called natural fiber bundles.
In mathematics, an affine bundle is a fiber bundle whose typical fiber, fibers, trivialization morphisms and transition functions are affine.



